一条 指令的执行过程 ,会产生数据流,即 形成数据通路 。数据的通断需要 由不同布线方式的CU 产生的 控制信号 控制。
多条指令的执行采用 指令流水线 方式并行工作
4.1 CPU功能
4.1.1 ALU功能
对数据加工:对数据进行算术和逻辑运算
4.1.2 CU功能
指令控制
确保程序的顺序执行
- 取指:自动形成指令地址,自动发出取指令的命令
- 分析 :操作码移码;产生操作数的有效地址‘
- 执行:根据分析阶段得到的”操作命令“ 和 ”操作数地址“ 形成操作信号控制序列,控制各个部件完成相应操作
- 中断处理 :管理总线及输入输出,处理异常情况(断电)和特殊请求(打印机请求打印一行字符)
操作控制
一条指令的执行需要若干操作先后组合实现
CPU管理并产生每条指令的操作信号,将各操作信号送至相应部件,并控制这些部件完成相应动作
时间控制
为每条指令按时间按顺序执行提供时钟信号
中断处理
对运行过程中的异常情况和特殊请求进行处理
4.2 CPU结构
4.2.1 运算器
接收从CU送来的命令并执行相应动作,对数据进行算术运算和逻辑运算
算术逻辑单元——ALU
进行算术或逻辑运算
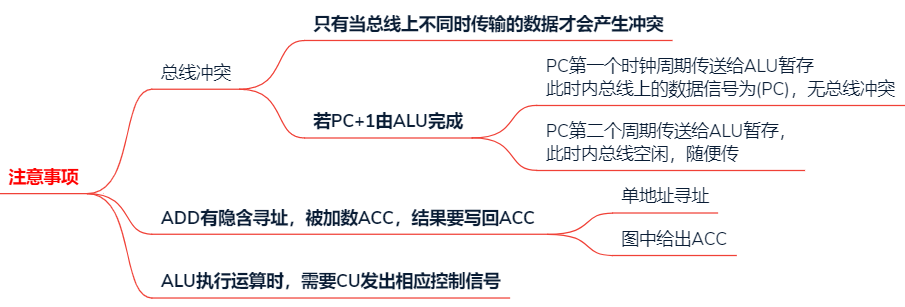
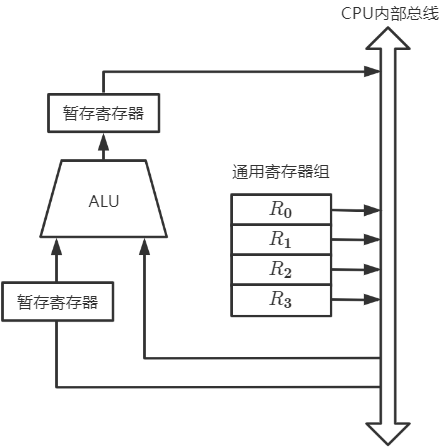
ALU内部没有存储功能的部件——ALU的两个输入端需要同时有效时,需要一个暂存器存储一个数据,再通过总线将数据直接传送到ALU另一输入端上
- ALU与暂存寄存器有专用通路 :数据传输总线周期
通用寄存器组——X
存放操作数、地址信息
包括AX,BX,CX,DX,SP(堆栈栈顶指针)
累加寄存器-ACC:存放ALU运算结果,作为加法运算的输入端
寄存器位数=机器字长 :一次可以处理的二进制位数
暂存寄存器
从主存中读来的数据,对应用程序员透明
程序状态字——PSW
PSW中的二进制位参与并决定微操作的形成
移位器
移位运算
计数器
乘除运算的操作步数
4.2.2 控制器
整个系统的指挥中枢
指令执行阶段——每条指令的执行有CU发出一组微操作控制
功能
- 从主存中取出一条指令,指出下条指令在主存中的位置
- 对指令进行译码或测试
- 产生相应的操作控制信号,指挥并控制CPU、主存、IO设备之间的数据流动信号
组成部件
程序计数器PC
存放下一条指令在主存中存放的地址
CPU根据PC的内容去主存中取指令
程序中指令顺序执行,所以PC有自增功能
指令寄存器IR
用于存放当前正在执行的指令
指令译码器
仅对操作码字段进行移码,向控制器提供特定的操作信号
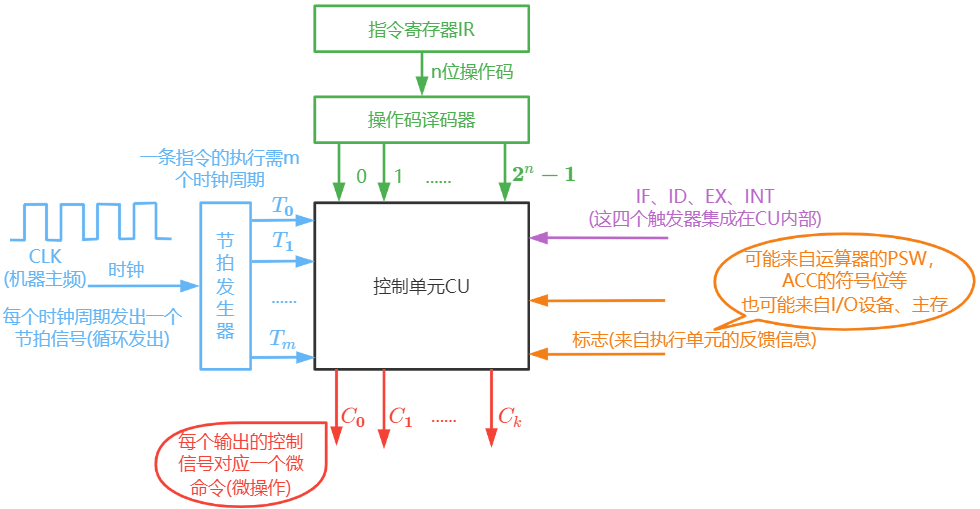
微操作信号发生器
根据
IR的内容(指令)、PSW的内容(状态信息)及时序信息,产生计算机系统所需的各种控制信号
| 微程序控制器 | 硬布线控制器 | |
|---|---|---|
| 工作原理 | 微操作控制信号以微程序的形式存放在 控制存储器中,执行指令时读出即可 | 微操作控制信号由组合逻辑根据 当前的指令码、状态和时序即时产生 |
| 执行速度 | 慢 | 快 |
| 规整性 | 较规整 | 繁琐,不规整 |
| 应用场合 | CISC CPU | RISC CPU |
| 易扩充性 | 易扩充修改 | 困难 |
时序信号
用于产生各种时序信号,由统一时钟分频得到
存储器地址存储器MAR
用于存放索要访问的主存单元的地址
存储器数据寄存器MDR
用于存放主存写入的信息或从主存读出的信息
硬布线控制器(组合逻辑型)
原理
根据
指令操作码、目前的机器周期、节拍信号、机器状态即可确定当前节拍应该发出哪些 微命令
- 用四个触发器标记指令的四个周期
如:(PC)->MAR的微命令
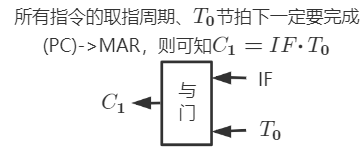
此时将 $C_1$ 接到 $PC_{out}$ 、$MAR_{in}$ 即可
特点
- 及时产生控制信号,执行速度快:由纯硬件实现控制,控制信号由组合逻辑电路产生
- 扩充指令困难:如果扩充一条指令,则需要修改与优化逻辑表达式,进而修改电路设计
- 指令越多,设计与实现越复杂,因此一般用于RICS
设计步骤
分析每个阶段的微操作序列(取值、间址、执行、中断)
确定哪些指令在什么阶段
什么条件下会使用到微操作
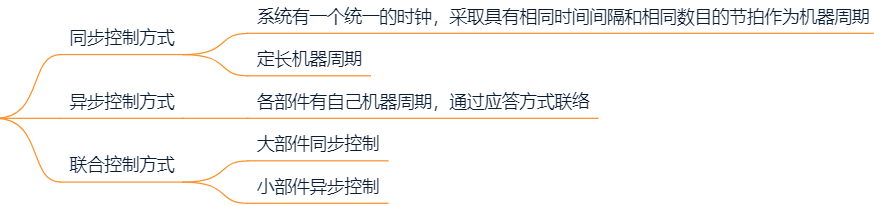
选择CPU的控制方式
采用定长机器周期还是不定长机器周期
每个机器周期安排几个节拍
安排微操作时序
如何用3个节拍完成整个机器周期内的所有操作
哪些微操作可以同时执行
电路设计
确定每个微操作命令的逻辑表达式,并用电路实现
1. 分析指令系统中每个指令所需的微操作
罗列出所有指令在各个阶段的微操作序列,就可以知道在什么情况下用到某个微操作
根据指令操作码、目前机器周期、节拍信号、机器状态条件即可确定现在这个节拍下发出哪些”微操作”
- 取指周期
- 间址周期
2. CPU控制方式-机器周期的确定

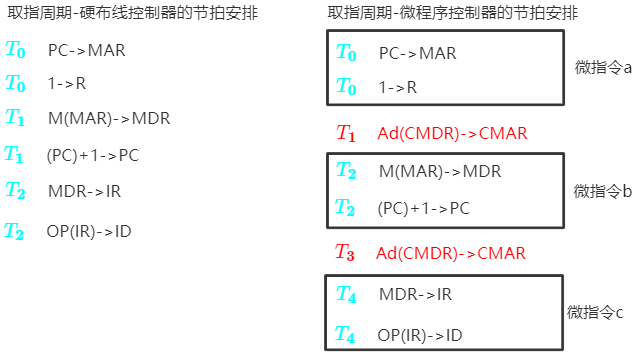
3. 微操作时序的确定
原则:
- 微操作的先后顺序不能随意更改
- 被控对象不同的微操作,尽量安排在一个节拍内完成
- 占用时间较短的微操作,尽量安排在 一个节拍内完成 ,并允许有先后顺序
$M(MAR)\rightarrow MDR$ 从主存取用数据,用时较长,因此必须占用一个时钟周期才能保证微操作的完成
$MDR\rightarrow IR$ 是CPU内部寄存器的数据传送,速度很快,因此在一个时钟周期内可以紧接着完成 OP(IR)->ID
- 将操作码送至译码器,产生执行周期微命令
4. 电路设计
- 列出操作时间表
- 确定最简逻辑表达式
- 画电路图
微程序控制器(存储控制型)
设计思路
微程序:由微指令序列组成,每一种指令对应一个微程序
程序:由指令序列组成
- 指令是对程序执行步骤的描述
- 微指令是对指令执行步骤的描述
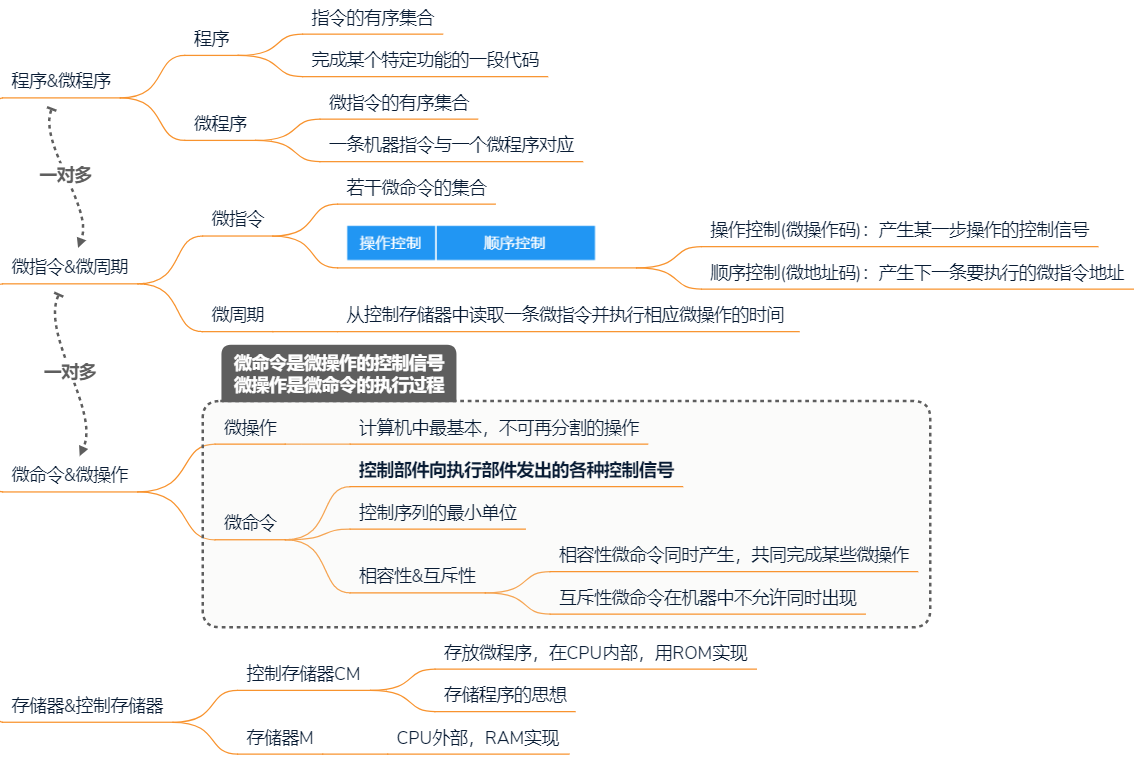
互斥型微命令:不允许并行完成的微命令
相容性微命令:可以并行完成的微命令
微程序CU结构
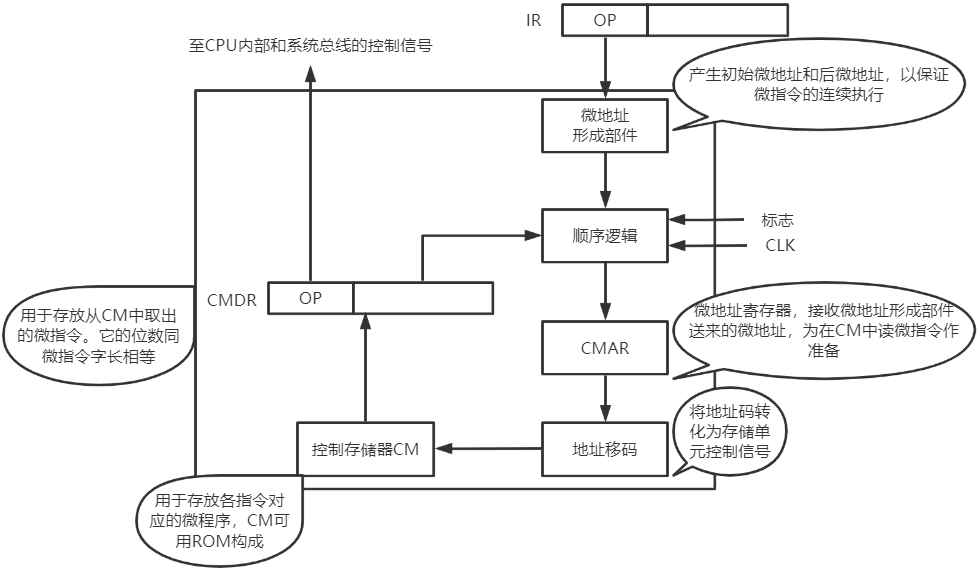
CMAR:对应CPU的MAR于PC
微地址形成部件 :根据操作码确定微程序的起始地址
顺序逻辑 :调整微指令执行顺序
CM :控制存储器,厂家会将该CPU支持的所有机器指令对应的微程序写入CM中
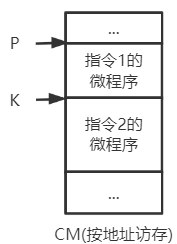
CM中最少微程序数=机器指令数+1(取微指)
若多条指令的 取指周期 、 间址周期 、中断周期 的微操作都相同,可将这些微指令编为一个微程序
CM容量的计算
工作原理
一条机器指令执行周期工作过程:
取微指令
机器运行时,自动将 取指微程序入口地址 送往
CMAR从
CM中读出相应的微指令送入CMDR取指微程序执行完后,当前机器指令存入
IR指令操作码字段通过
微地址形成部件产生该机器指令对应的 微程序入口地址 ,并送往CMAR从
CM中逐条取出微指令并执行执行完一条机器指令的微程序后,回到 取指微程序入口地址
微程序控制单元的设计
编写各条机器指令所对应的微程序
分析每个阶段的微操作序列
写出机器指令对应的微操作命令及节拍安排
写出每个周期所需要的微操作
补充微程序控制器特有的微操作
取指周期
Ad(CMDR)->CMAR:每条微指令结束之后都需要进行OP(IR)->微地址形成部件->CMAR:取指周期的最后一条微指令完成后,要根据指令操作码确定其执行周期的微程序首地址执行周期
Ad(CMDR)->MAR:每条微指令结束之后都需要进行
确定微指令格式
编写微指令码点
1. 分析每个阶段微操作序列
2. 写出机器指令对应的微操作命令及节拍安排
确定
微操作对应的微指令
微指令下地址的形成
第一条微指令地址由硬件形成
其余微指令由上一条微指令的下地址字段直接给出
最后一条微指令,其后继微指令地址由微地址形成部件形成,与操作码有关
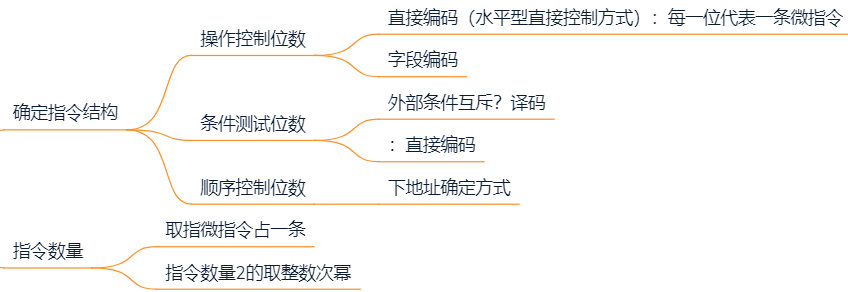
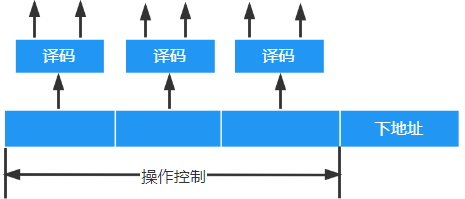
3. 确定微指令格式
根据微操作个数决定采用何种编码格式——确定 操作控制字段 的位数
根据 CM 中存储的微指令总数,确定微指令的 顺序控制字段 的位数
按 操作控制字段 位数和 顺序控制字段 位数就可确定微指令字长
水平型微指令:一条微指令能定义多个可并行的微命令
优点:微程序短,执行速度快
缺点:微指令长,编写微程序比较麻烦
某微程序控制器中,采用水平型直接控制(编码)方式的微指令格式,后续微指令地址由微指令的下地址字段给出。已知机器共有28个微命令,6个互斥的可判定的外部条件,控制存储器容量为521*40位,设计微指令格式

某机共有52个微操作控制信号,构成5个互斥的微命令组,各组分别包含5,8,2,15,22个微命令、已知可判定的外部条件有两个,微指令字长28位,按水平型微指令格式设计微指令,微指令的下地址字段直接给出后继微指令地址

垂直型微指令:一条微指令只能定义一个微命令,由微操作码字段规定具体功能
优点:微指令短,简单,规整,便于编写微程序
缺点:微程序长,执行速度慢,工作效率低
4. 编写微指令码点
根据 操作控制字段 每一位代表一个微操作命令,编写每个微指令码点
微指令的设计
- 微指令的具体格式
- 如何根据微指令发出相应微命令
微命令与微操作一一对应,一个微操作对应一个控制信号输出线
有的微操作可以并行执行,一条微指令可以包含多个微命令
微操作字段(微指令的控制方式)
a. 直接编码(直接控制)方式
在微指令的操作控制字段中,
每一位代表一个微操作命令
某位为 1 表示该控制信号有效
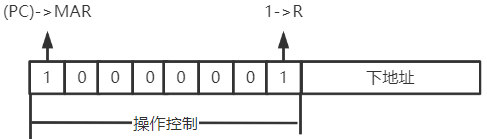
优点:简单直观;执行速度快;操作并行性好
缺点:微指令字长过长(n个微命令要求微指令的操作字段有n位),造成CM容量极大
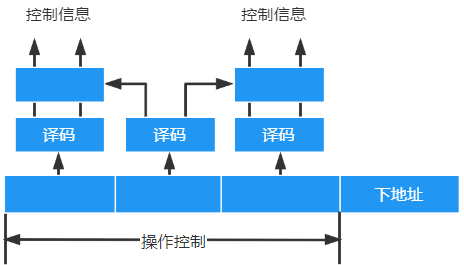
b. 字段直接编码方式
将微指令的控制字段分成若干段,
每段经译码后发出控制信号
分段原则
- 互斥性微命令分在同一段内,相容性微命令分在不同段内
- 每个小段中包含的信息不能太多,否则将增加译码线路的复杂性和译码时间
- 一般每个小段还要留出一个状态,表示本段不发出任何微命令。因此某字段的长度为3位时,最多只能表示7个互斥的微命令,
000表示不操作
某计算机的控制器采用微程序控制方式,共有33个微命令,构成5个互斥类,分别包括7,3,12,5和6个微命令,则操作控制字段有多少位
- 直接编码方式:33种微命令,操作控制字段需要33位
- 字段直接编码方式:3+2+4+3+3=15位,操作控制字段需要15位
c. 字段间接编码方式
一个字段的某些微命令需由另一字段中的某些微指令来解释
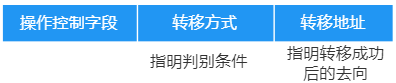
微地址码字段(微指令地址形成方式)
微指令的
下地址字段指出:微指令格式中设置一个下地址字段,直接指出后继微指令的地址
根据机器指令的
操作码形成当机器指令取至指令寄存器后,微指令的地址由操作码经微地址形成部件形成
增量计数器法
(CMAR)+1->CMAR
分支转移
由硬件产生微程序入口地址
第一条微指令地址 由专门硬件产生(用专门的硬件记录取指周期微程序首地址)
中断周期:由硬件产生 中断周期微程序首地址(由专门的硬件记录)
某计算机采用微程序控制器,共32条指令,公共的取指指令微程序包含2条微指令,各指令对应的微程序平均由4条微指令组成,采用下地址字段法确定下调微指令地址,则微指令下地址字段的位数是多少位?
总共需要存储 $32\times 4+2=130$ 条微指令,标注130条微指令需要 $\lceil log_2{130}\rceil = 8$ 个二进制位
4.3 数据通路
4.3.1 概念
数据通路:数据在各功能部件之间传送的路劲
数据通路部件:数据通路上的部件
执行部件/功能部件:数据通路中进行数据运算的部件
控制部件产生的控制信号建立数据通路
数据通路的每个部件都需要控制信号
三态门(单选):一个控制信号,通断控制
多路选择器(多选一):一个控制信号,条件控制
内部总线:同一部件内的总线,如CPU内总线
系统总线:同一台计算机系统各个部件间的总线,如CPU、内存、通道、IO接口
4.3.2 功能
实现CPU内部的数据交换
- ALU-Reg
- Reg-Reg
- Reg-主存
4.3.3 结构
专用数据通路
只要与ALU有数据/地址流动,就排线
若直接用导线相连,相当于寄存器组同时与ALU传送数据,故需要进行 选择控制部件
多路选择器MUX,选择一路输出
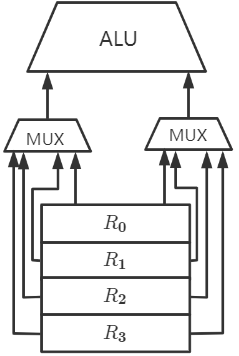
三态门控制每一路是否有输出
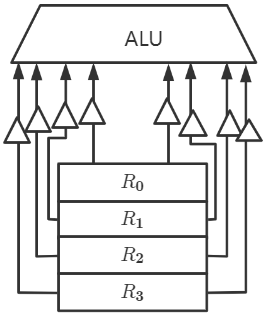
特点:
性能高,不存在数据冲突
多个专用数据通路可同时工作
结构复杂,硬件量大,不易实现
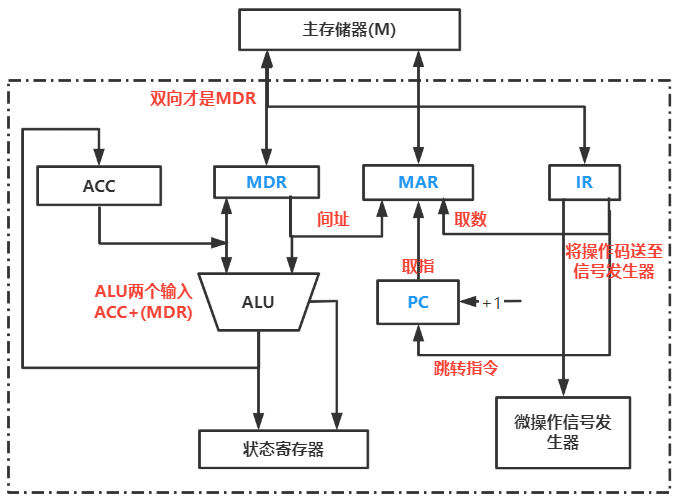
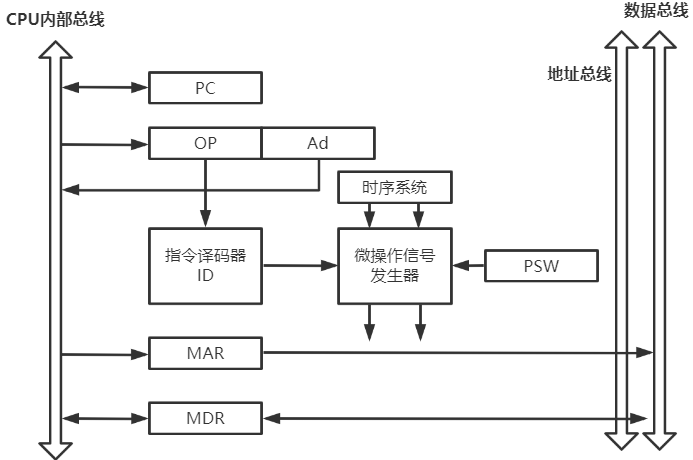
- PC是自增寄存器
- PC内容是地址,所以送往MAR
- 与微操作信号发生器相连的是IR
- 与主存相连的寄存器时MAR和MDR
内总线
内部总线:同一部件,如CPU内部连接各个寄存器和运算部件之间的总线
系统总线:指同一台计算机系统的各部件,如CPU、内存、通道和各类I/O接口间互相连接的总线
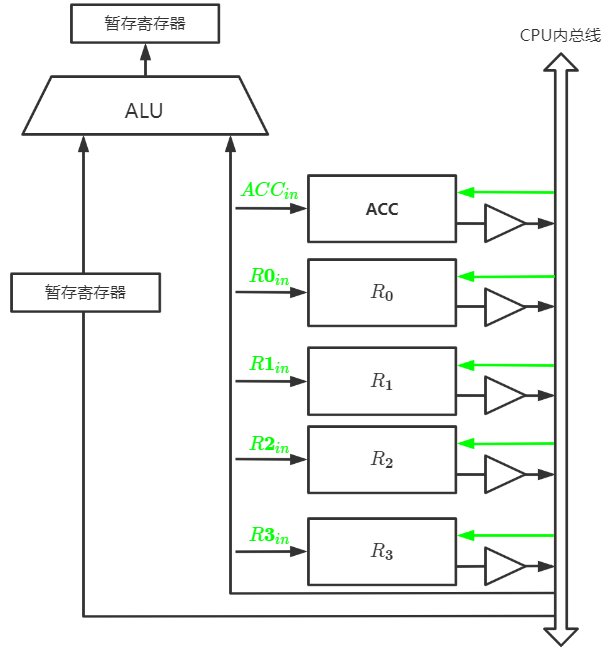
特点
- 结构简单,容易实现
- 数据传输出在数据冲突现象
- 内总线除了ALU与暂存器(输入&输出)有专用数据通路外,其余全部通过总线连接,包括IR与PC
CPU内单总线方式
- 同一时刻只允许一组功能部件进行数据传输
- 每完成一个微操作,都需要撤销之前的控制信号,解除对总线的占用
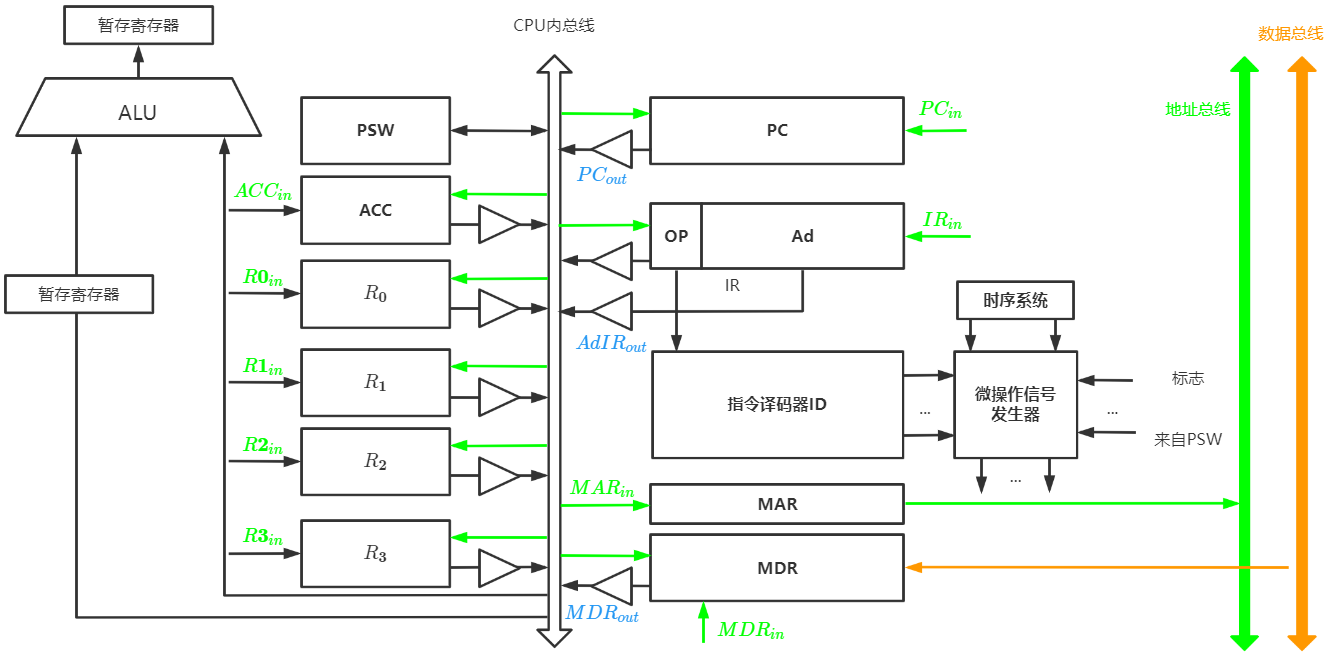
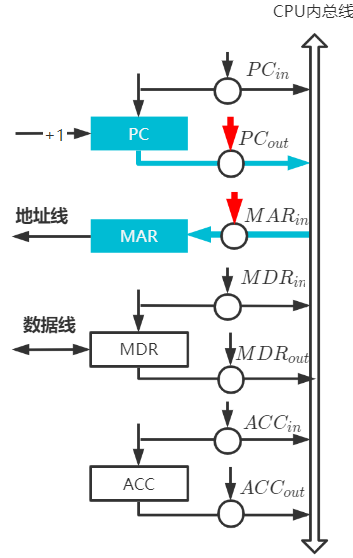
Reg-Reg间数据传送
比如把PC内容送至MAR,实现传送操作的流程及控制信号为
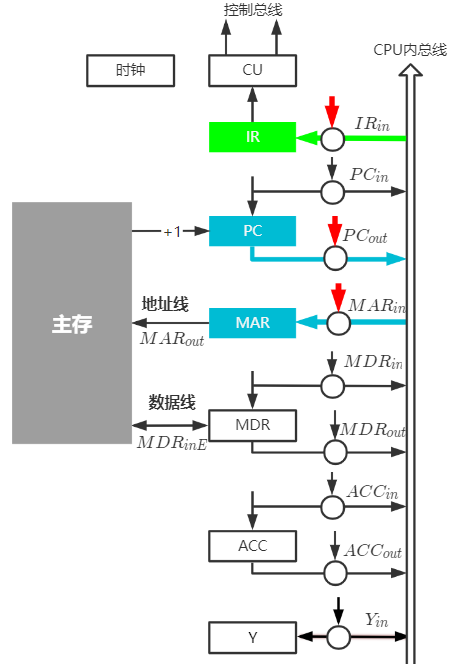
CPU-主存
CPU从主存读取指令,实现传送操作的流程及控制信号为:
ALU-Reg(执行算术或逻辑运算)
一条加法指令,微操作序列及控制信号为:
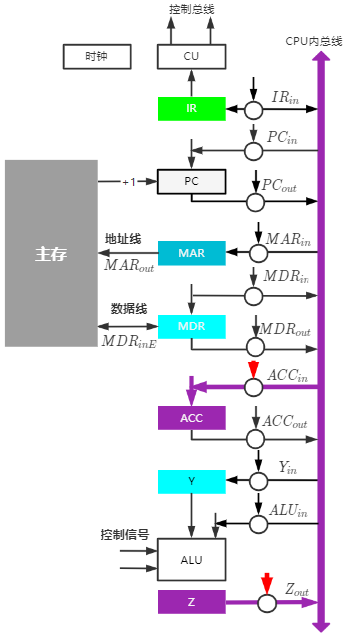
- 暂存寄存器Y与CPU之间有专用数据通路,数据传输不占用总线周期
分析指令 ADD (R0),R1 的指令流程和控制信号
分析指令功能和指令周期
功能:((R0))+(R1)->(R0)
取指周期、间址周期 、执行周期
写出各阶段的指令流程
取指周期:公共操作
| 时序 | 微操作 | 有效控制信号 |
|---|---|---|
| 1 | $(R0)\rightarrow MAR$ | $R_{out},MAR_{in}$ |
| 2 | $M(MAR)\rightarrow MDR$ | $MemR,MAR_{out},MDR_{inE}$ |
| 3 | $(MDR)\rightarrow Y$ | $MDR_{out},Y_{in}$ |
| 4 | 指令译码 | - |
间址周期:完成取数操作,被加数在主存中,加数已经放在寄存器R1中
| 时序 | 微操作 | 有效控制信号 |
|---|---|---|
| 1 | $(R0)\rightarrow MAR$ | $R0_{out},MAR_{in}$ |
| 2 | $M(MAR)\rightarrow MDR$ | $MemR,MAR_{out},MDR_{inE}$ |
| 3 | $(MDR)\rightarrow Y$ | $MDR_{out},Y_{in}$ |
执行周期:完成相加操作
| 时序 | 微操作 | 有效控制信号 |
|---|---|---|
| 1 | $(R1)+(Y)\rightarrow Z$ | $R1_{out},ALU_{in},CU向ALU发ADD控制信号$ |
| 2 | $(Z)\rightarrow MDR$ | $Z_{out},MDR_{in}$ |
| 3 | $(MDR)\rightarrow M(MAR)$ | $MemW,MDR_{outE},MAR_{out}$ |