[TOC]
基于策略的RL方法 用策略函数 $\pi(a\vert s,\theta)$ 的输出表示当前状态下决策的可能性
更适合处理高维度或连续的动作空间 具有更好的收敛性质和稳定性 能够学习随机策略 利用机器学习模型的泛化能力,将已知状态的策略泛化到未知状态的策略 。
最优的策略可以通过最优化策略度量标量的目标函数获取,这种方法称为 策略梯度
所有的策略度量指标 $J(\pi)$ 都是 $\pi$ 的函数,而 $\pi(a\vert s,\theta)$ 是关于参数 $\theta$ 的函数 ,不同的参数值 $\theta$ 会影响策略优劣的度量值,因此,通过最优化 $\theta$ 的值来最大化这些度量指标,可以找到最优的策略
直观上理解:策略的梯度上升,是为了让策略更多采样到带来较高Q值的动作,更少采样带来较低Q值的动作
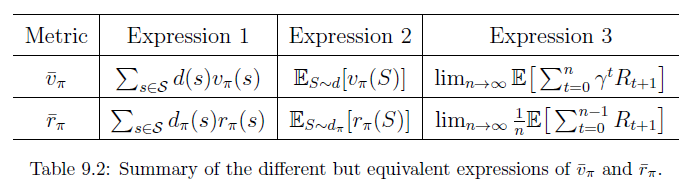
策略度量指标 平均状态价值 $\overline{V}_{\pi}$ 为在策略 $\pi$ 下加权平均的状态价值 $d(s)\ge 0,\sum\limits_{s\in \mathcal{S}}d(s)=1$ 是状态 $s$ 的权重,也可以理解为状态的概率分布 $S\sim d$ 若求解加权平均,需要知道状态 $S$ 服从的分布 $d$
若状态分布与策略无关:平均状态价值记为 $\overline{V}_{\pi}^0$
每个状态都是同等重要的,将 $d_0$ 视为均匀分布,$d_0(s)=\frac{1}{\vert \mathcal{S}\vert}$ 只关注特定的状态 $s_0$ , 如在一些任务中所有回合都从相同的起始状态 $s_0$ 出发,实际上就是最大化从 $s_0$ 出发得到的回报,因此 $d_0(s_0)=1,d_0(s\neq s_0)=0\Rightarrow\overline{V}_{\pi}=V_{\pi}(s_0)$ 若状态分布与策略有关: $d$ 是策略 $\pi$ 下的稳态分布
平均单步奖励 其中,$r_{\pi}(s)=\sum\limits_{a\in \mathcal{A}(s)}\pi(a\vert s,\theta)r(s,a)$ ,$r(s,a)=E[R\vert s,a]=\sum\limits_{r’}r’P(r’\vert s,a)$
二者关系 $\overline{r}_{\pi}$ 是一种非常短视的度量指标,只考虑立即奖励,相反,$\overline{V}_{\pi}$ 是一种相对远视的度量指标,考虑到所有步的总奖励,虽然二者不相等,但成正比
一个达到最优,另一个也能达到极值
两种度量指标的等价形式
策略度量指标的梯度 所有度量指标的梯度有一个统一形式
$J(\theta)$ 是不同的策略度量指标 $\overline{V}_{\pi},\overline{r}_{\pi},\overline{V}_{\pi}^0$
$=$ 可以是等于、近似、成比例
$\eta$ 是状态的分布或状态的权重,在不同问题中呈现不同的分布
为便于计算,将策略的梯度改写为对数似然形式
代入策略度量指标的梯度中,
softmax随机策略 需要计算 $\ln\pi(a\vert s,\theta)$ ,必须保证 $\pi(a\vert s,\theta)>0,\forall a,s,\theta$
用softmax将决策值可以归一化为
其中,$\pi(a\vert s,\theta)$ 的值由函数 $h(s,a,\theta)$ 确定,即 $h(\cdot)$ 为参数为 $\theta$ 的策略函数,输入状态会给出该状态下执行某个动作的概率
策略函数 $h(\cdot)$ 可以用神经网络实现,输入为 $s$ ,参数为 $\theta$,输出由 $\vert \mathcal{A}(s)\vert$ 个
策略优化 对策略函数的优化方法通过梯度上升法最大化 $J(\theta)$
真实的动作价值 $Q_{\pi}(s_t,a_t)$ 也是未知的,需要近似
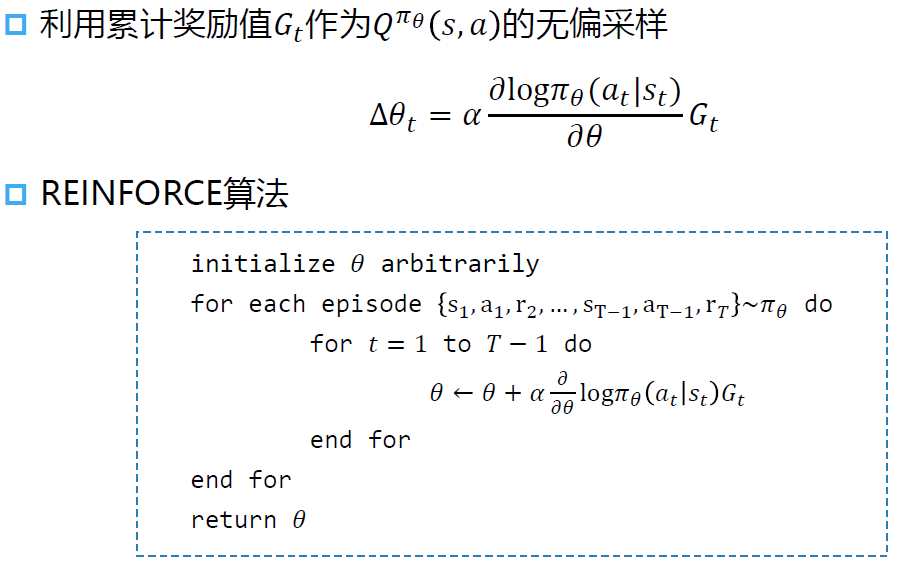
基于MC方法去近似动作价值,称为 REINFORCE 算法
用累积奖励值的无偏采样 $Q_{t}(s_t,a_t)=G_t$ 去近似 $Q_{\pi}(s_t,a_t)$
AC框架基于TD算法去近似
REINFORCE
也可以用过多轮预演的均值来近似Q
同策略学习,但必须等一个回合的数据采集完成后才能调整一次策略 从单个或多个片段中采样到的回报去估计动作价值有很高的方差 REINFORCE 算法理论上是能保证局部最优的,它实际上是借助蒙特卡洛方法采样轨迹来估计动作价值,这种做法的一大优点是可以得到无偏的梯度。但是,正是因为使用了蒙特卡洛方法,REINFORCE 算法的梯度估计的方差很大,可能会造成一定程度上的不稳定,这也是 Actor-Critic 算法要解决的问题
REINFORCE 算法便是采用了蒙特卡洛方法来估计Q值函数
车杆环境 1 2 3 4 5 6 7 8 import gymimport torchimport torch.nn as nnimport torch.nn.functional as Fimport numpy as npimport matplotlib.pyplot as pltfrom tqdm import tqdmimport rl_utils
策略网络 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 class PolicyNet (nn.Module): """ 定义策略网络,其输入是某个状态,输出则是该状态下的动作概率分布。 """ def __init__ (self, state_dim:int , hidden_dim:int , action_dim:int ): super ().__init__() self.fc1 = nn.Linear(state_dim, hidden_dim) self.fc2 = nn.Linear(hidden_dim, action_dim) def forward (self, x:torch.Tensor ) -> torch.Tensor: """ 这里采用在离散动作空间上的 softmax() 函数来实现一个可学习的多项分布(multinomial distribution)。 """ x = F.relu(self.fc1(x)) return F.softmax(self.fc2(x), dim=1 )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 class REINFORCE : """ REINFORCE 算法 """ def __init__ (self, state_dim:int , hidden_dim:int , action_dim:int , learning_rate:float , gamma:float , device:torch.device ): self.policy_net = PolicyNet(state_dim, hidden_dim, action_dim).to(device) self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr=learning_rate) self.gamma = gamma self.device = device def take_action (self, state:np.ndarray ) -> int : """根据动作概率分布随机采样""" state = torch.tensor(np.array([state]), dtype=torch.float ).to(self.device) probs = self.policy_net(state) action_dist = torch.distributions.Categorical(probs) action = action_dist.sample() return action.item() def update (self, transition_dict:dict ): reward_list = transition_dict['rewards' ] state_list = transition_dict['states' ] action_list = transition_dict['actions' ] G = 0 self.optimizer.zero_grad() for i in reversed (range (len (reward_list))): reward = reward_list[i] state = torch.tensor(np.array([state_list[i]]), dtype=torch.float ).to(self.device) action = torch.tensor(np.array([action_list[i]]), dtype=torch.int64).view(-1 , 1 ).to(self.device) log_prob = torch.log(self.policy_net(state).gather(1 , action)) G = self.gamma * G + reward loss = -log_prob * G loss.backward() self.optimizer.step()
训练过程 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 learning_rate = 1e-3 num_episodes = 1000 hidden_dim = 128 gamma = 0.98 device = torch.device("cuda" ) if torch.cuda.is_available() else torch.device("cpu" ) env_name = "CartPole-v0" env = gym.make(env_name) env.seed(0 ) torch.manual_seed(0 ) state_dim = env.observation_space.shape[0 ] action_dim = env.action_space.n agent = REINFORCE(state_dim, hidden_dim, action_dim, learning_rate, gamma, device) return_list = [] for i in range (10 ): with tqdm(total=int (num_episodes / 10 ), desc='Iteration %d' % i) as pbar: for i_episode in range (int (num_episodes / 10 )): episode_return = 0 transition_dict = { 'states' : [], 'actions' : [], 'next_states' : [], 'rewards' : [], 'dones' : [] } state = env.reset() done = False while not done: action = agent.take_action(state) next_state, reward, done, _ = env.step(action) transition_dict['states' ].append(state) transition_dict['actions' ].append(action) transition_dict['next_states' ].append(next_state) transition_dict['rewards' ].append(reward) transition_dict['dones' ].append(done) state = next_state episode_return += reward return_list.append(episode_return) agent.update(transition_dict) if (i_episode + 1 ) % 10 == 0 : pbar.set_postfix({ 'episode' : '%d' % (num_episodes / 10 * i + i_episode + 1 ), 'return' : '%.3f' % np.mean(return_list[-10 :]) }) pbar.update(1 )
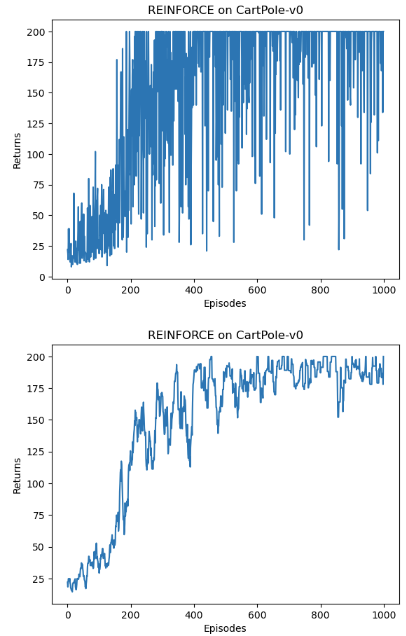
结果 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 import osos.environ["KMP_DUPLICATE_LIB_OK" ]="TRUE" episodes_list = list (range (len (return_list))) plt.plot(episodes_list, return_list) plt.xlabel('Episodes' ) plt.ylabel('Returns' ) plt.title('REINFORCE on {}' .format (env_name)) plt.show() mv_return = rl_utils.moving_average(return_list, 9 ) plt.plot(episodes_list, mv_return) plt.xlabel('Episodes' ) plt.ylabel('Returns' ) plt.title('REINFORCE on {}' .format (env_name)) plt.show()
训练过程大约用了5min
随着收集到的轨迹越来越多,REINFORCE 算法有效地学习到了最优策略。不过,相比于前面的 DQN 算法,REINFORCE 算法使用了更多的序列 ,这是因为 REINFORCE 算法是一个在线策略算法,之前收集到的轨迹数据不会被再次利用。
此外,REINFORCE 算法的性能也有一定程度的波动,这主要是因为每条采样轨迹的回报值波动比较大,这也是 REINFORCE 算法主要的不足。