[TOC]
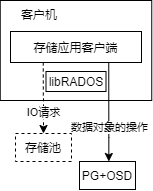
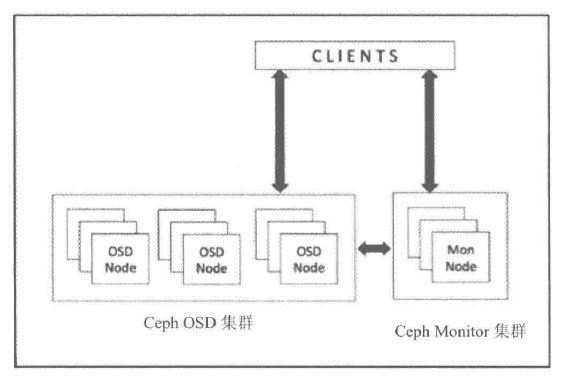
RADOS层对外提供存储池及池内的数据读写功能,通过PG、OSD等底层支撑组件实现对数据的组织和存储
libRADOS层是RADOS集群对外功能的唯一接口,将上层对存储池的数据读写操作转换为对PG及OSD的操作
- 进行目的OSD的寻址——CRUSH算法
- 通过网络发送操作请求,并接收操作结果
提供CLS功能与Watch/Notify机制的接口
- CLS实现了层次穿越、上层应用定义下层数据操作规则 的机制(RBD,RGW会用)
- Watch/Notify机制实现了 上层应用对特定RADOS对象的事件监控与消息传递 (缓存同步与RBD快照)
libRADOS层运行在上层应用的进程中,并与Monitor节点建立并保持连接,获取最新的OSDMAP、MONMAP (CRUSH算法)
PG与libRADOS
PG在libRADOS层中,只参与操作请求的寻址过程。libRADOS并不参与PG的创建与管理。
在存储池被创建时,由系统创建PG
在存储池创建过程中,libRADOS只是将池的创建请求消息 POOL_OP_CREATE 发送给Monitor,由Monitor完成具体的池创建操作。
libRADOS结构
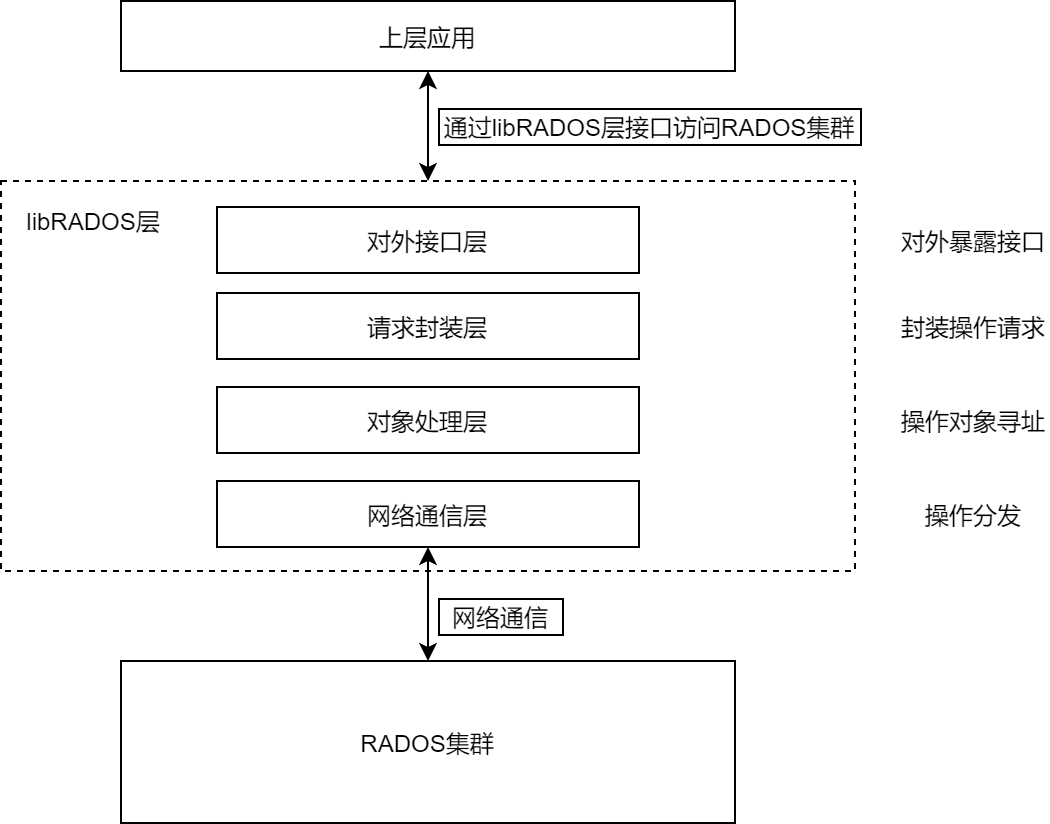
对外接口层 :上层存储应用统一的调用接口
请求封装层:实现I/O请求的封装
对象处理层 :通过CRUSH算法寻址
- 操作对象所述PG的确定
- 目的OSD寻址
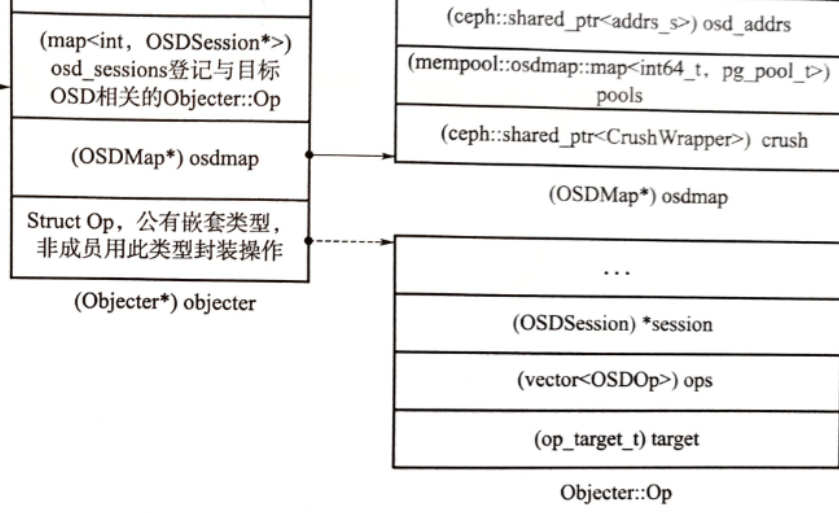
在 Objecter 类实现,
Objecter重要结构:OSDMAP是CRUSH算法运行的基础,osd_session记录OSOD的网络连接情况Objecter::Op封装操作请求,并定义了一系列操作函数(处理、提交操作请求的方法)
网络通信层 :相对独立,操作对象寻址完成后,通过本层的工作线程发送到目的OSD
- OSD、Monitor等组件中共用同样的网络通信模块
- 有多种实现方式,默认实现为Async模式,采用工作队列和多线程方式进行网络数据的收发
IOCtxImpl
libRADOS的实现类为 IoCtxImpl ,记录了操作请求的上下文信息,将上层应用的操作转换为OSDOp等OSD可识别的格式
IOCtxImpl 与特定的目标存储池相关联,对存储池的操作由该类处理
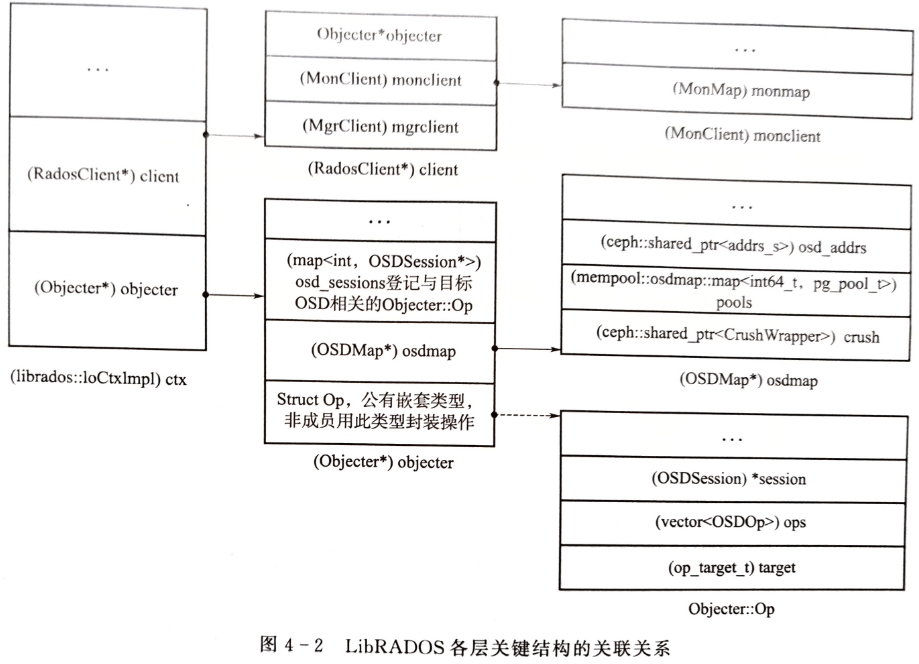
在创建 IOCtxImpl 类时,相关的 RadosClient 和 Objecter 等结构也会创建
RadosClient内的monclient负责与Monitor节点建立连接,并进行身份认证
libRADOS层主要功能
libRADOS对外提供的功能接口
libRADOS采用C++实现,对外提供C、C++、Python、Java和PHP的开发接口
- RGW、RBD等上层应用使用C++接口
libRADOS接口的完整操作包括 配置集群句柄 、创建I/O会话 、整理I/O操作 、提交I/O操作、资源后处理
集群句柄
配置集群句柄:RADOS.init() 、RADOS.connect()
RADOS类包含管理存储池的接口 Rados.pool_create() Rados.pool_delete() Rados.pool_list()
I/O会话类
IOCtx 包含libRADOS的大部分接口。
Rados.ioctx_create()创建I/O会话类。在进行I/O操作之前,需要先与一个具体的存储池关联,这个过程就是I/O会话类的创建过程通过
IOCtx进行实际的I/O访问创建对象
IOCtx.Create()、删除对象IOCtx.remove()对象的读写操作分为:同步操作和异步操作
同步数据读写操作:
- 写内容数据;读内容数据
IOCtx.read()- 向特定的偏移量写一定长度的数据
IOCtx.Write() - 全部覆盖写
IOCtx.write_full() - 追加写
IOCtx.append()
- 向特定的偏移量写一定长度的数据
- 写XATTR数据
IOCtx.setxatrtr();读IOCtx.getxattr() - 写OMAP数据
IOCtx.omap_set();读IOCtx.omap_get_vals()
异步数据读写操作:
对应的异步读写操作函数
IOCtx.aio_write(),IOCtx.aio_read();IOCtx.aio_write_full(),IOCtx.aio_append()IOCtx.aio_setxatrtr(),IOCtx.aio_getxattr()在上层应用层,与
AioCompletion类配合,供上层应用异步地判断操作执行状态1
AioCompletion.is_complete(),由应用层定义回调函数,在收到执行操作结果后执行主动回调处理
- 写内容数据;读内容数据
提供一次提交多个操作的接口
IOCtx.operate()和IOCtx.aio_operate()多个整合后一次性提交,降低网络带宽负载
要求多个操作针对同一个对象 ,提交前通过
ObjectOperation类将多个操作整合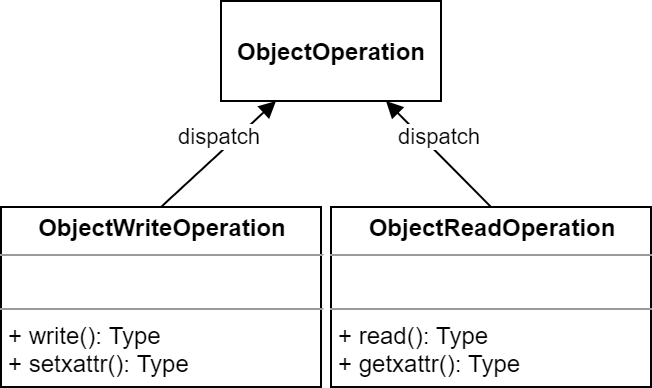
CLS
通过 IOCtx.exec() 可发起对OSD内特定动态链接库的相关函数调用
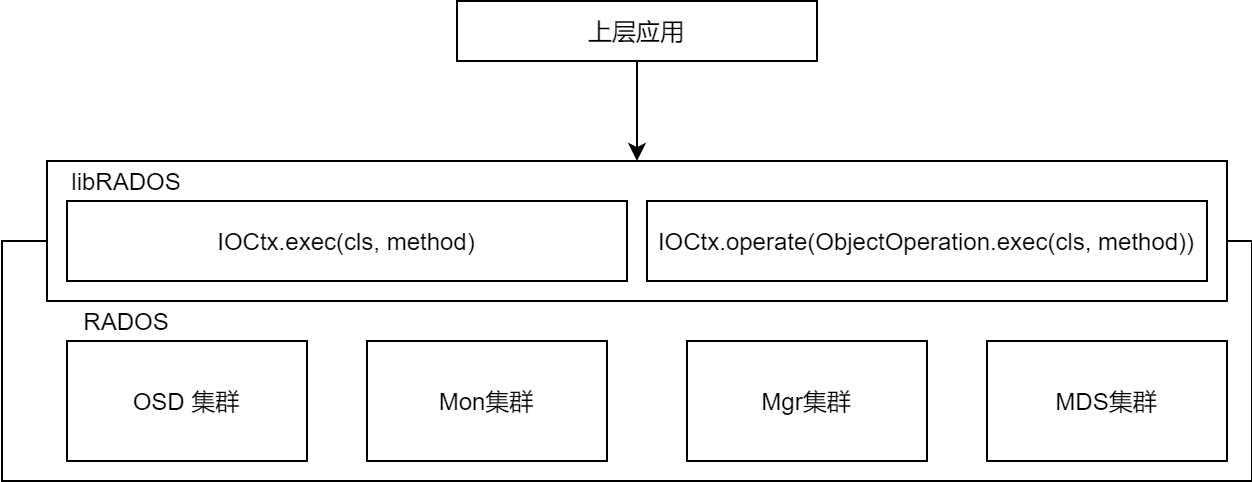
cls指定特定的动态链接库,method指定动态链接库中调用的函数名- 通过
ObjectionOperation.exec()接口将调用请求与其他操作合并, 由IOCtx.operate()接口一并提交
寻址
CRUSHMAP
CRUSHMAP基于OSDMAP构建,CRUSH算法只需要OSD设备的层级结构和OSD设备权重等基本信息,存放在 OSDMAP.crush 内
- libRADOS在与存储池关联过程中,会创建保存上下文信息的结构,此时,通过
IOCtxImpl.RadosClient到Monitor节点上获取OSDMAP,并存放在IOCtxImpl.Objecter成员结构中
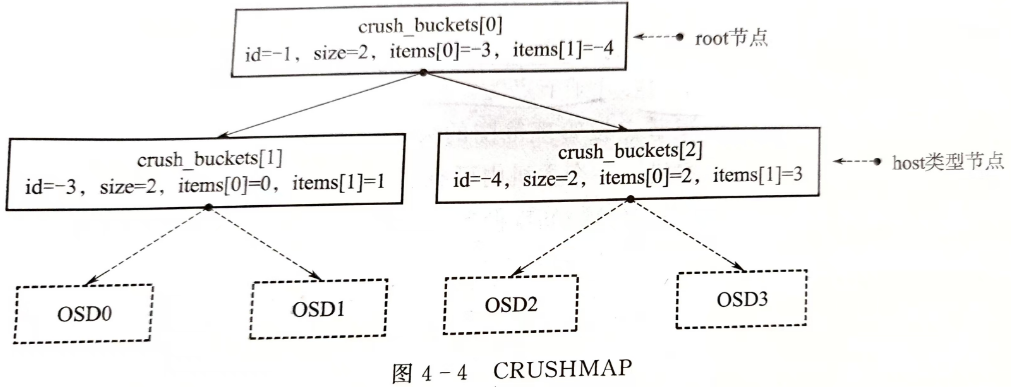
在具体实现上,会基于OSDMAP重新构建一个CRUSHMAP,默认以结构数组的方式描述。
逻辑上,CRUSHMAP是一个树形结构,用于描述集群的物理布局,叶子节点为实际的OSD设备,中间节点称为Bucket节点
系统定义了10个Bucket级别
Bucket节点类型定义为
1
2
3
4
5
6
7
8
9struct crush_bucket{
__s32 id; /*bucket 标识符,小于0,且同一CRUSHMAP中是唯一的*/
__u16 type; /*bucket类型大于0,由调用者定义*/
__u8 alg; /* 选择算法 ::crush_algorithm */
__u8 hash; /* 哈希函数,默认是 CRUSH_HASH_* */
__u32 weight; /* 16.16定点小数,权重为子节点权重的和 */
__u32 size; /* 子节点数量 __item__array 的大小 */
__s32 * item; /* 子节点列表;小于0表示bucket,大于等于0表示item */
}
更多关于CRUSHMAP的管理见 Ceph操作及管理
CRUSH是一种计算寻址算法
分布式存储系统的架构分为 有中心架构 和 无中心架构 。
有中心架构——元数据机制:每次有新数据添加到存储系统时,元数据最先更新,之后才是实际的数据存储
最显著缺点是易造成单点故障,复杂的元数据管理机制是存储系统在高伸缩性、高可用性和I/O性能的瓶颈
无中心架构
计算模式:Ceph
一致性哈希模式:Swift
CRUSH算法是Ceph的一种可控的、可扩展的、分布式副本数据放置算法(Controlled Replication Under Scalable Hashing),客户端使用自己的系统资源按需计算元数据而不存储元数据,元数据计算过程成为 CRUSH查找
可控的:体现为可重复性,对同一对象的计算始终会得出同一“地址”
CRUSH算法的核心是hash运算,默认的hash算法是Jenkins算法。
CRUSH算法目标:使RADOS对象在所有OSD设备上按设备容量大小均匀分布,进而使OSD设备有相同的空间使用率
OSD权重越高,表示物理存储容量越大
一旦任何一个OSD设备写满,集群会进入保护状态,停止对外服务
通过CRUSH算法可以实现跨故障域传播数据及其副本
同一PG的目标OSD组应分布在不同的故障域内,防止单点故障
CRUSH寻址过程
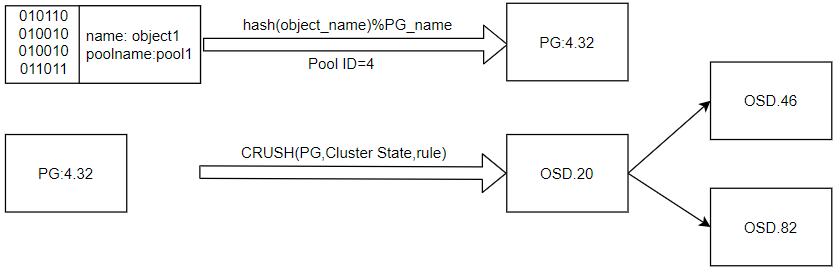
- 基于对象id和池id获取对象所属的PG id
- 基于PGID和CRUSHMAP选择目标OSD组
计算PG id
目的:去除对象id和PGID之间的相关性,使其在数值空间上分布均匀
输入对象id,使用hash算法进行哈希,得到hash值
目标:使池内的对象在各PG内均匀分布
对哈希值
hash(对象id)按池的PG数取余hash(对象id)% (PG_num)合并两步结果作为PGID,如 (4.32),PGID是一个二维结构
hash算法是伪随机的,所以对象id在数值空间上是均匀分布的;经过取余操作后,也是均匀分布的。
PGID的计算过程是确定的、可重复的
计算OSD组
默认使用straw2模式——重复性,多轮次的hash运算,hash算法仍采用Jenkins算法。
计算出PGID的hash值:
PGID_hash=hash(PGID)设定选择轮次 r,查找主OSD时,$r==0$ ;查找其他从OSD时依次增加
开始正式的选择。从CRUSHMAP的根节点root开始,针对每一个节点的子节点执行hash运算
将得到的hash值 $U$ 执行一个与 $log_2$ 有关的对数转换运算,再除以该子节点的权重因子,得到本每轮该子节点的CRUSH值 $CRUSH[ID]$
- $log_2$ 对数转换用于调整结果在数值空间上的分布,放大计算结果的差异
得到所有子节点的CRUSH值,选择CRUSH值最大的子节点作为候选节点
直至选出位于叶子节点的OSD设备,完成本轮选择
改变重试次数r,进行下一轮选择,直至选出目标OSD组的所有成员
数据分布调整方式
- 定制CURSHMAP的查找规则
- 设定OSD的迁移权重
reweight - 人工设定与池相关的特定OSD的权重
weight-set,间接干预CRUSH算法的寻址结果 - 通过
upmap直接指定PG寻址结果 - Ceph Mgr组件中有自动调节数据分布的模块 Balancer ,实质上也是通过
reweight、weight-set、upmap
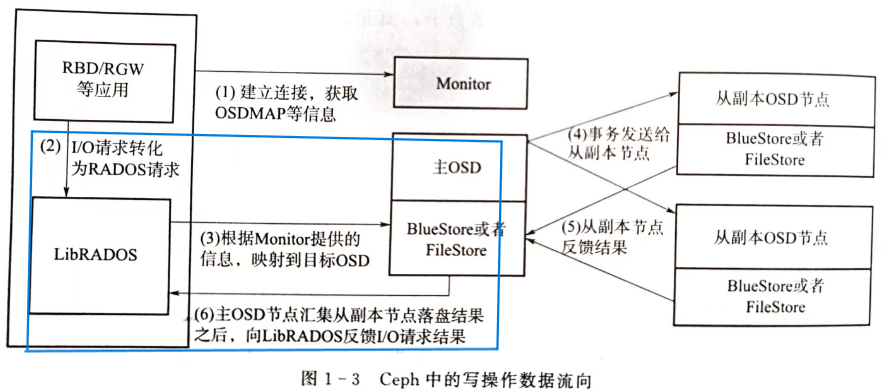
libRADOS对读写操作的提交过程
1 | /* examples/librados/hello_world.cc */ |
首先,与RADOS建立连接,包括:与Monitor建立初始连接、进行用户身份认证、获取OSDMAP等,这部分内容见Monitor
然后,由libRADOS层的 IOCtx 实例 io_ctx.operate() / io_ctx.write_full() 完成IO操作转换与提交
1. 操作预处理,形成OSDOp结构
op.write_full() 函数内通过调用 add_data() 函数实现转换功能:操作请求经过 librados::ObjectiWriteOperation 整理,形成 OSDOp 结构。
OSDOp结构:包含操作类型、起始位置、长度、对象内容等信息
1
2
3
4
5
6struct OSDOp{
ceph_osd_op op;
sobject_t soid;
bufferlist indata, outdata;
...
}
1 | void ObjectOperation::add_data(int op, uint64_t off, uint64_t len, bufferlist &bl){ |
- 操作类型用操作码表示,存放在
OSDOp.op.op字段中,类型为无符号短整型,Writefull的操作码为CEPH_OSD_OP_WRITEFULL(),这是通用类型,在OSD侧也可识别 - 实际上,可以将对同一个对象的操作整合到一个
(librados::ObjectWriteOperation)op内,这样多个操作请求时,可形成一个原子事务,有利于保持多个请求的事务一致性
2. 正式操作,形成Objecter::Op结构
ioctx.operate() 调用 objecter->prepare_mutate_op() , 新建 Objecter::Op 结构,并导入 OSDOp 结构
Objecter::Op是librados侧处理请求的主要结构,涉及操作请求的生成、提交和事务后处理OSDOp保存在Objecter::Op.ops内在
prepare_mutate_op()函数内,设定操作请求的回调函数C_SafeCond::finish存入Objecter::onfinish内对于异步写入操作,回调函数在
C_SafeCond类内实现,后续,该类基于条件变量和信号量处理回调请求、唤醒等待的线程
1 | Op * prepare_mutate_op(..., ObjectOperation &op, ...){ |
3. Objecter::on_submit()
ioctx.operate() 调用 Objecter::op_submit() 进行目的OSD寻址。
Objecter::on_submit()接口的实现是_on_submit()功能:确定PG、OSD寻址、操作请求的发送
寻址
PG寻址
对对象名哈希得到对象名哈希值
hash_objid = ceph_str_hash_rjenkins(对象名)对对象名哈希值按PG数取模
pg_mod = ceph_stable_mod(hash_objid)将
POOLID与pg_mod组合作为PGID如
PGID = (40.7)
hash算法使用的是jenkins算法,虽然计算量相对较大,但可以产生很好的分布
通过CRUSH算法进行目的OSD组寻址
CRUSH算法默认为straw2,
CRUSHMAP使用结构数组表示
- Bucket节点由一个数组成员
crush_bucket[]表示(id,item[],weight) - OSD节点不占用
crush_bucket[]空间,OSD id存放在父 Bucket 的item[]中
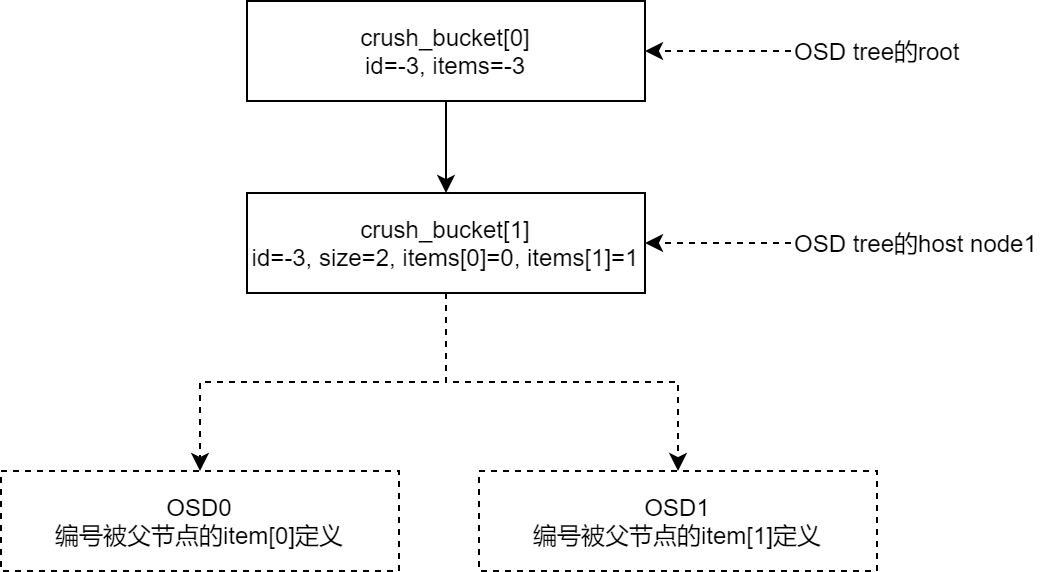
从root节点
crush_bucket[0]开始查找子节点,对PGID的hash值、子节点id、重试次数r进行哈希u = hash(PGID_hash, id, r)通过将不同OSD节点的ID加入哈希运算,使不同的OSD得到不同的哈希结果u
取 $u$ 的后16位,进行straw2算法的核心运算,
$ln =2\textasciicircum 44*log2(u_2[:-16]_{10}+1)-0x1000000000000$
使用 $log_2$ 目的是利用其在概率上的分布特性,有利于结果的均匀分布
将 $ln$ 与
CRUSH_BUCKET[0]的子节点items[]的权重做除法得出本级节点的 CRUSH值,选出最大的子节点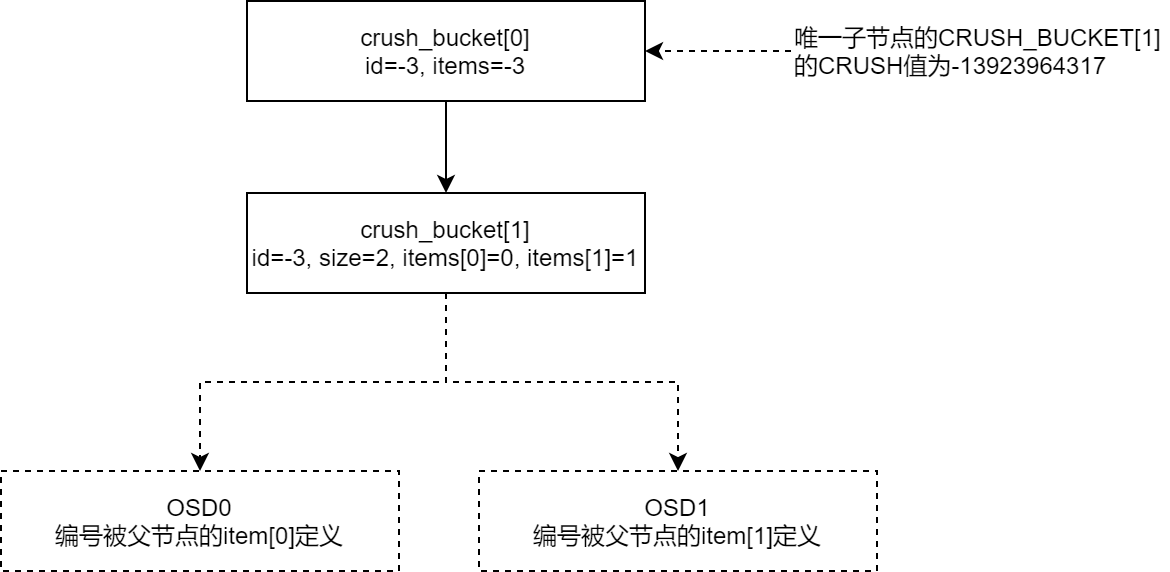
针对选出的子节点
CRUSH_BUCKET[1]重复上述操作,计算OSD的CRUSH值,选择CRUSH值最大的OSD节点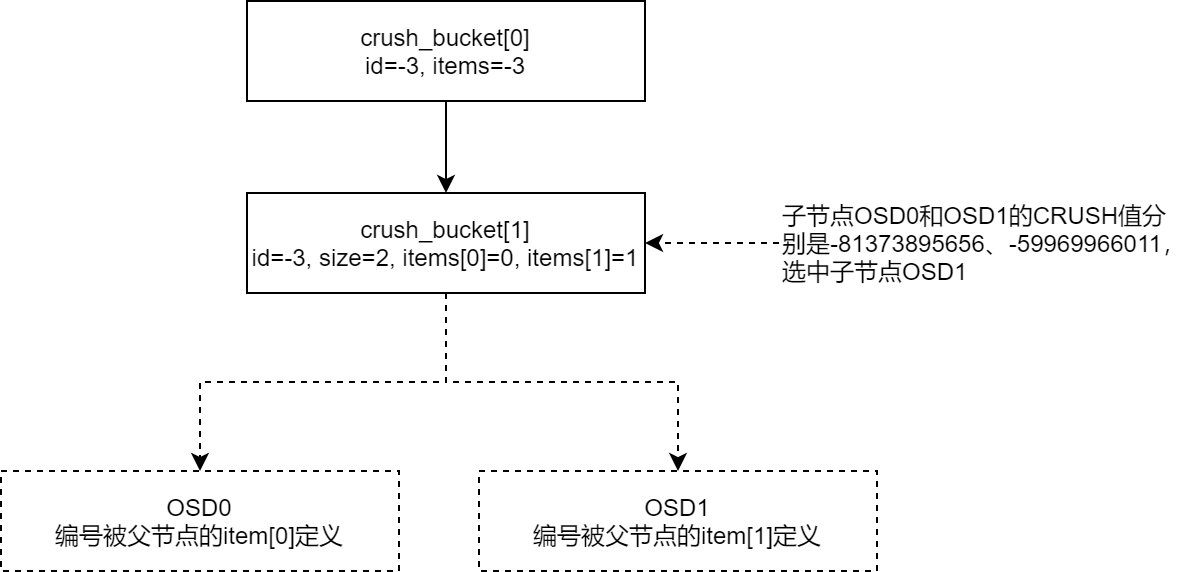
计算复杂度:PG寻址与OSD寻址过程进行了1+1+N次hash运算
- 1:计算PGID时,对象名的hash
- 1:计算PGID_hash,去除PGID之间的相关性
- N:对CRUSHMAP中相关节点进行
hash(PGID_hash, id, r)可见,哈希运算对CRUSH算法至关重要
寻址结果
寻址所用的CRUSHMAP存放在 ctx.objecter.osdmap.crush
寻址结果存放在 target 中
PGID存放在(pg_t *)target.PGID- 目的OSD存放在
(int *)target.osd
发送操作请求
创建OSDSession,形成MOSDOp消息,将Objecter::OP登记入OSDSession
在 Objecter::_on_submit() 中,将查找或创建OSDSession
OSDSession存放与特定OSD相关的会话信息,包括:网络会话+已发送但未确认的MOSDOp信息
后续通过OSDSession获取网络通信层的网络会话,通过它查找OP调用回调函数
创建OSDSession:通过OSDID从OSDMAP中获取目标OSD的IP地址和TCP端口号,进而建立TCP会话
1 |
|
创建MOSDOp结构 :与 Objecter::Op 相比,MOSDOp 同样拥有 vector<OSDOp> ops ,额外增加PGID字段(存储后端根据PGID分配消息的处理队列和处理线程)
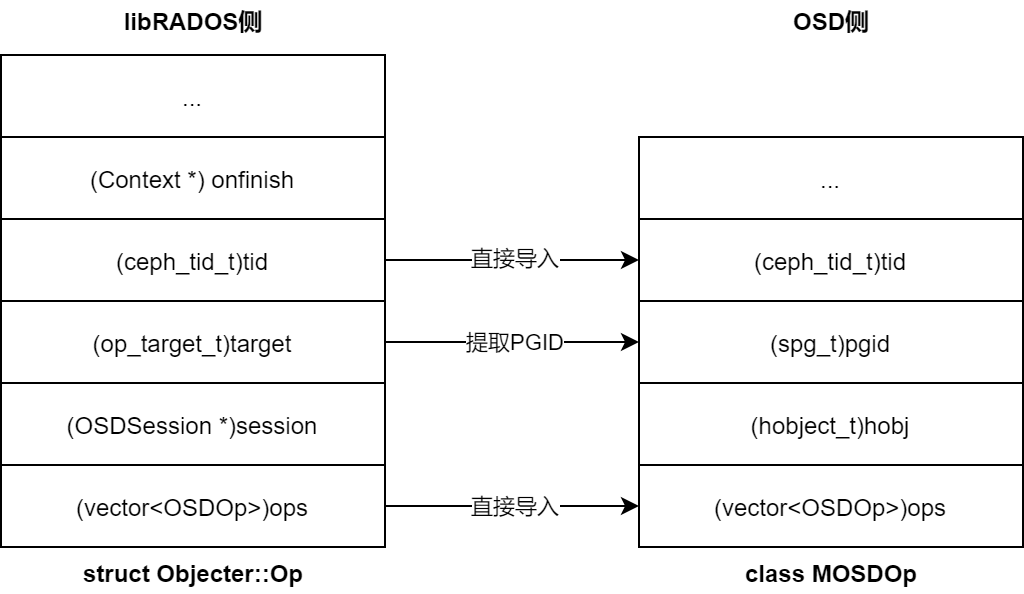
- tid的生成:依据OSDSession中已处理请求的次数顺序递增生成tid(transaction id)。因此操作请求由libRADOS标识,在OSDSession中唯一
Objecter::tid导入MOSDOp.header.tid供 OSD侧标识本次请求
将 Objecter::OP.tid 登记入 OSDsession.ops :调用 Objecter::_session_op_assign() 函数,将OP登记入 (map<cephg_tid_t>, Op*) OSDSession.ops
- 这一步目的:后续OSD返回操作结果时,查找OP和进行回调处理
1 |
|
Objecter::_op_submit() 调用 Objecter::_send_op() 准备发送消息
调用网络层接口发送消息
网络通信层默认
async模式,采用了基于事件的I/O多路复用技术,由专门的发送队列和发送发送线程进行数据发送
Objecter::_send_op() 调用网络层接口函数 AsyncConnection::send_message() 将待发送消息放入发送队列
1 |
|
同步写入
对于同步写操作,操作处理线程将阻塞,等待被回调函数唤醒
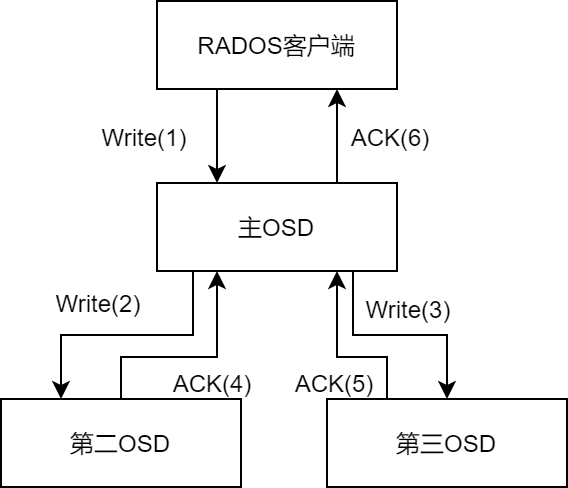
消息的实际发送由专门的发送线程调用 AsyncConnection::write_message() 发送给主OSD进行落盘
1 | ssize_t AsyncConnection::write_message(Message *m, bufferlist& bl, bool more){ |
对于libRADOS而言,只需将操作请求发送给主OSD,从OSD的数据写入由主OSD负责
操作请求也由主OSD反馈给libRADOS层
4. 主OSD反馈执行结果,回调函数通知等待线程
网络通信层有专门的工作线程接收OSD反馈的落盘结果消息,并进行关联OP的查找与回调函数的调用
基于 Objecter::OP.tid 在 objecter.osd_session 中检索,定位到对应的原始 Objecter::OP
Objecter::OP 中定义了回调函数 C_SafeCond::finish ,被保存在 Objecter::onfinish
在函数体中,判断反馈结果状态,采用信号量机制唤醒操作处理线程
1
2
3
4
5
6
7
8
9
void C_SafeCond::finish(int r) override {
lock->Lock();
if (rval)
*rval = r;
*done = true;
cond->Signal();
lock->Unlock();
}Signal()会进一步调用操作系统的pthread接口函数pthread_cond_broadcast()唤醒操作处理线程1
2
3
4
5
6
7
8
9
10
int Signal() {
// make sure signaler is holding the waiter's lock.
assert(waiter_mutex == NULL ||
waiter_mutex->is_locked());
//linux操作部系统部的pthread接口,唤醒等待线程
int r = pthread_cond_broadcast(&_c);
return r;
}
被唤醒线程确认此次写操作的执行结果,进行必要的资源清理工作
异步与同步区别
对于网络通信层而言,除要调用的回调函数不同,其他并无区别
- 同步方式,提交操作请求后,立即阻塞线程,等待OSD反馈的结果,再进一步处理
- 异步方式,提交操作请求后,可非立即性、批量地、异步地检查反馈结果,并确认完成结果
libRADOS的Watch-Notify机制
libRADOS的Watch-Notify机制,为上层应用提供了集群内跨节点的消息传递机制——用于上层应用的跨节点数据同步
分为Watch阶段与Notify阶段,需要由上层存储应用指定同一个RADOS对象(Watcher对象)
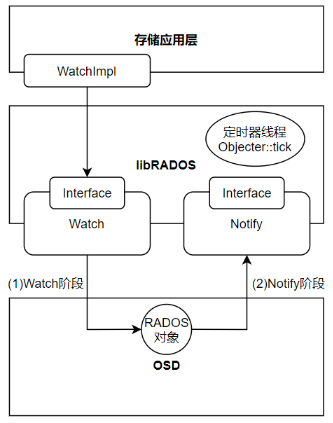
Watch阶段,上层应用层实现libRADOS层的Watch接口
1 | int watch2( |
IOCtx.unwatch2()取消监视
Notify阶段,libRADOS提供Notify接口,在OSD层实现,用于发布消息
1 | int notify2( |
心跳更新操作
为向OSD证明自身可接收Notify消息,libRADOS需要定期向watcher对象所在的OSD发送心跳更新操作 CEPH_OSD_WATCH_OP_PING 。OSD收到心跳更新操作后,更新其维护的watcher列表,反馈 CEPH_MSG_OSD_OPREPLY 消息给libRADOS。
- libRADOS若未收到OSD的反馈信号,则调用异常处理函数
handle_error(),由上层应用进行处理
心跳更新操作的实现为 objecter::tick 定时器线程执行。
定时器线程是libRADOS的一部分,负责运行状态的libRADOS与OSD、watcher等相关方的周期性检测。
在创建watch的过程中,libRADOS内部会形成一个
LingerOp结构向OSD提交请求过程,会调用
Objecter::_session_linger_op_assign()函数,将LingerOp登记入(map<uint64_t, LingerOp*>)OSDSession.linger_ops内
Objecter::tick定时器线程会周期性地遍历每个OSDSession的linger_ops结构,判断LingerOp状态正常后libRADOS每隔
objecter_tick_interval则发送一次心跳,该线程轮询检查所有的OSD session中记录的LingerOp并调用_send_linger_ping()发送心跳请求
1 |
|