查找的概念与部分实现
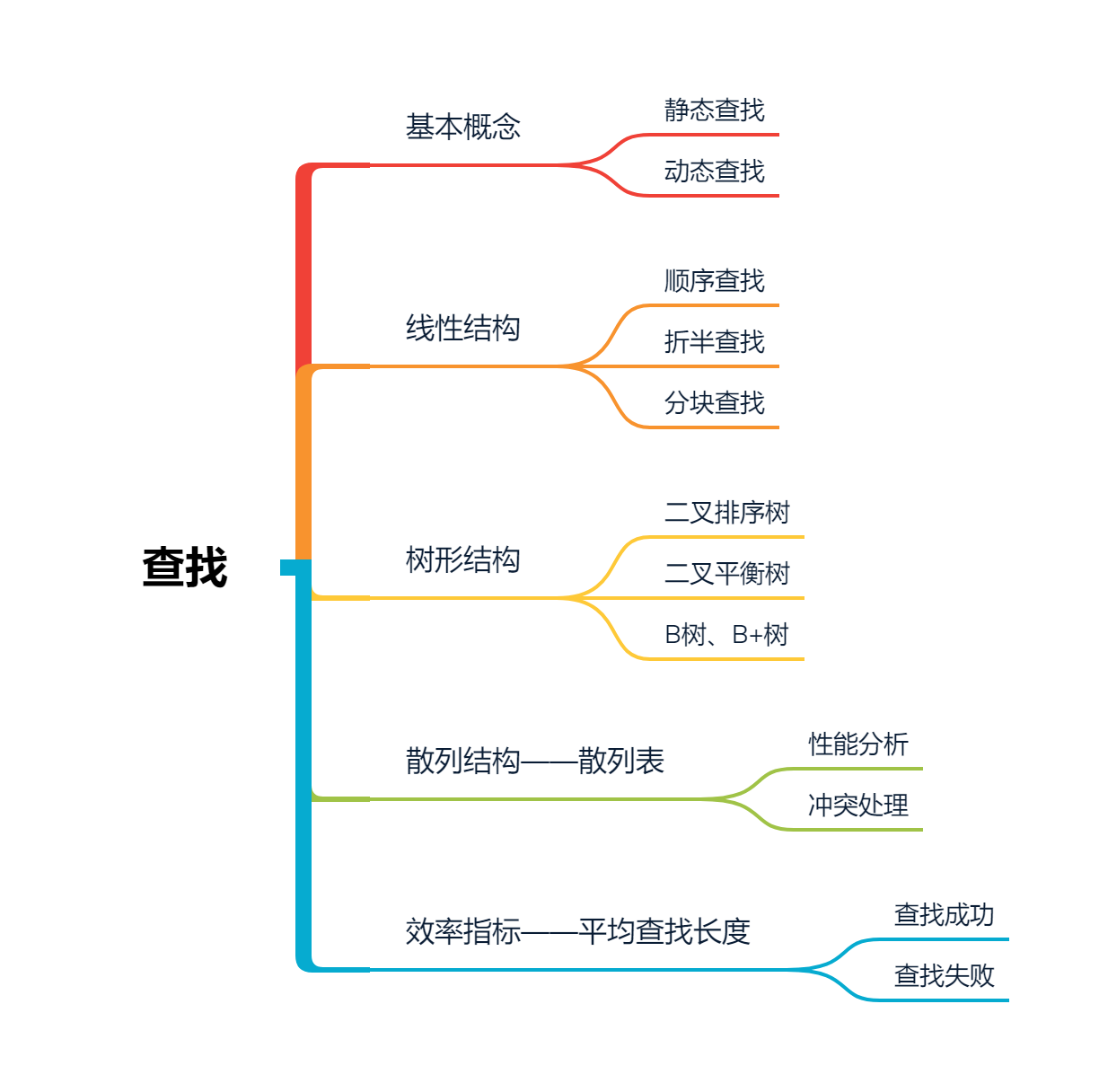
5.2 线性结构的查找
1 | typedef struct{ |
5.2.1 顺序查找
存储结构:顺序表;链表
扫描所有查找表每个元素的方式
顺序表:下标递增
链表:
next指针域哨兵的作用:
SSTable.elem[0]设为哨兵,不必检查数组是否越界,i=0一定会跳出循环
1. 无序线性表的顺序查找
1 | int Search_Sq(SSTable ST,KeyType key){ |

优点
- 存储结构:顺序存储、链式存储
- 链式结构只能顺序查找
- 对数据的有序性无要求
缺点
- 效率低
2. 有序顺序表的顺序查找
1 | int Search_Sq(SSTable ST,KeyType key){ |
5.2.2 折半查找
适用情况:有序的顺序表
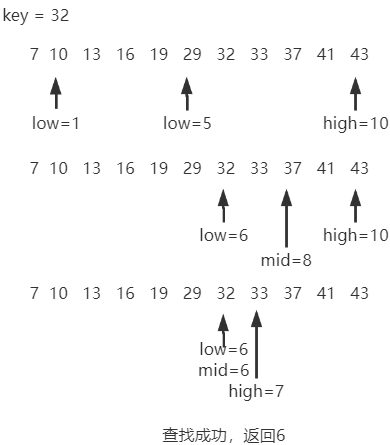
1 | int Binary_Search(SSTable L,ElemType key){ |
查找失败

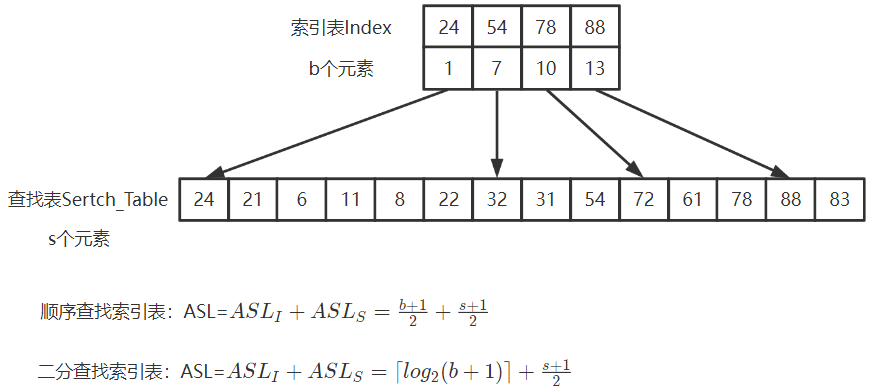
5.2.3 分块查找
将查找表分为若干块。块内无序,块间有序。
第一块最大关键字小于第二块最大关键字
索引表:索引表中存储每块的最大关键字和各块中的第一个关键字地址
索引表按关键字有序排列
分块查找步骤
索引表中查找待查记录所在块
顺序查找、折半查找索引表
块内顺序查找
5.3 树型结构的查找
5.3.1 二叉排序树
1 | typedef struct TreeNode{ |
p->lchild->data < p->data < p->rchild->data;
- 中序遍历可以得到有序序列
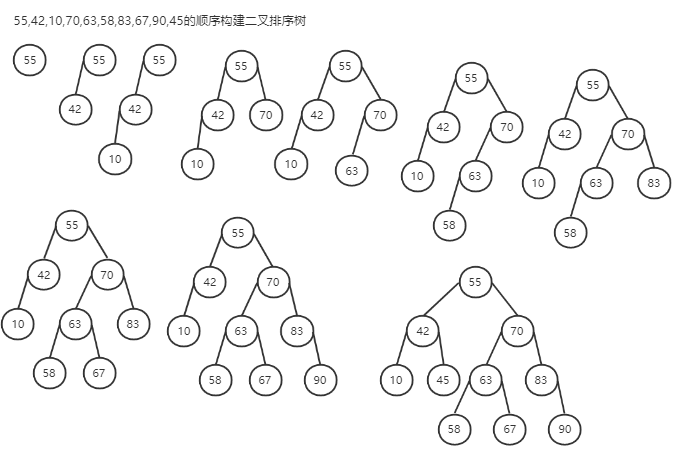
1. 构建

2. 查找
1 | while(!T && key != T->data){ |
一棵二叉排序树上的查找序列,第 n,n+1 个数不能分居第 n-1 个数的两侧如

3. BST插入
查找过程中,不存在目标结点,再插入
新插入的结点一定是一个叶结点,且是查找失败时,查找路径上访问的最后一个结点的孩子
1 | void Insert(BST T,Node *p){ |
4. BST删除
BST中元素间的相对位置与BST中序序列中元素间的相对位置相同
- 若删除结点
p是叶结点,则直接删除 - 若删除结点
p是某单支树,则用其孩子结点代替 - 若删除结点
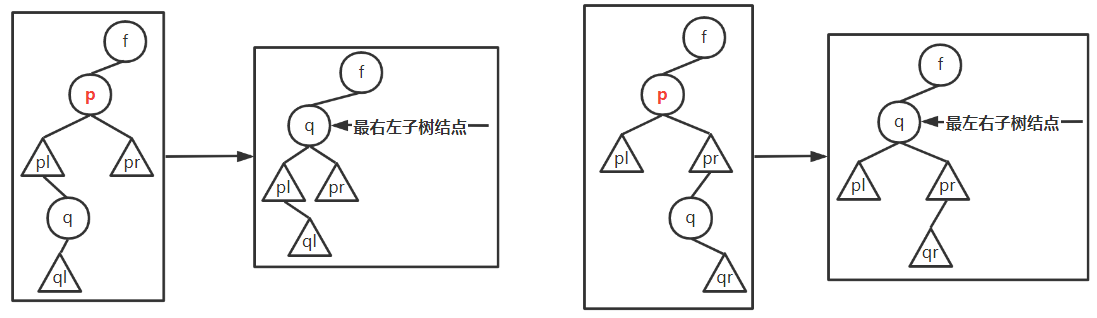
p有左右孩子- 用直接后继
next代替,p的左孩子变为next的左孩子,p的右孩子变为next的最右左子树 - 用直接前驱
pre代替,p的右孩子变为pre的右孩子,p的左孩子变为pre的最左右子树
- 用直接后继
1 | void Transplant(BST T, Node *x, Node *y){// y替换x的位置 |
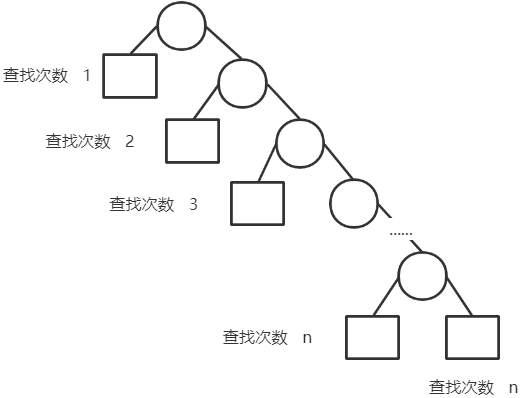
5. BST平均查找长度
计算
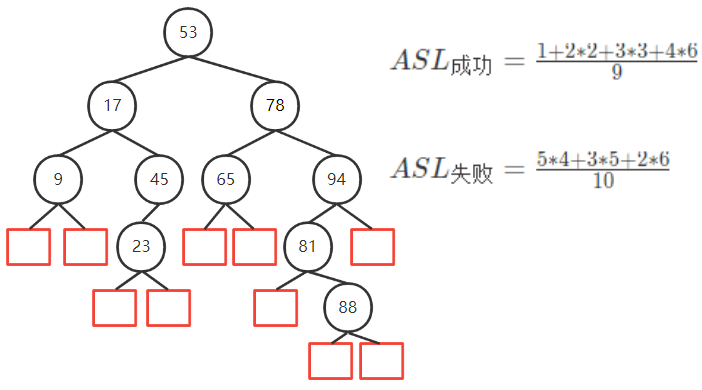
- 查找失败的情况相当于将 $(-\infty,+\infty)$ 用n个数分为 n+1 个区间
最好情况 ASL = $O(logn)$ 平衡二叉树
最坏情况 ASL = $O(n)$ 单链表
6. 二分查找与二叉排序树
ASL相同
二分查找判定树唯一
BST是动态树,不唯一
插入顺序不同,生成的BST不同

n个结点的B树高度
最小高度
每个结点尽可能满 m-1 个关键字,m个分叉
$(m-1)(1+m+m^2+…+m^{h-1})=(m-1)\frac{1-m^h}{1-m}=m^h-1 \Longrightarrow h\ge log_m(n+1)$
最大高度
各层分叉尽可能少,除第一二层其他层结点 $\lceil \frac{m}{2} \rceil$
2. 基本操作
插入
要求
- 除根结点,每个结点关键字个数 $\lceil \frac{m}{2} \rceil -1 \le n \le m-1$
- $子树0上的关键字 <k_1 < k_2 < … < k_{m-1}<子树1上的关键字$
步骤
新元素插入后在最底层 “终端结点”,动态确定插入位置
插入结点后,若 $结点关键字个数 > m-1$ ,则从中间位置 $\lceil \frac{m}{2} \rceil$ 处分裂为两部分
$\lceil \frac{m}{2} \rceil$ 右面部分形成一个新结点
$\lceil \frac{m}{2} \rceil$ 处关键字加入父结点的关键字,若此行为造成父结点关键字个数 > m-1,则父结点继续分裂,B树高度加一

删除
对非终端结点关键字删除必可转化为对终端结点的删除
删除后,本结点关键字个数不够 $\lceil \frac{m}{2} \rceil$
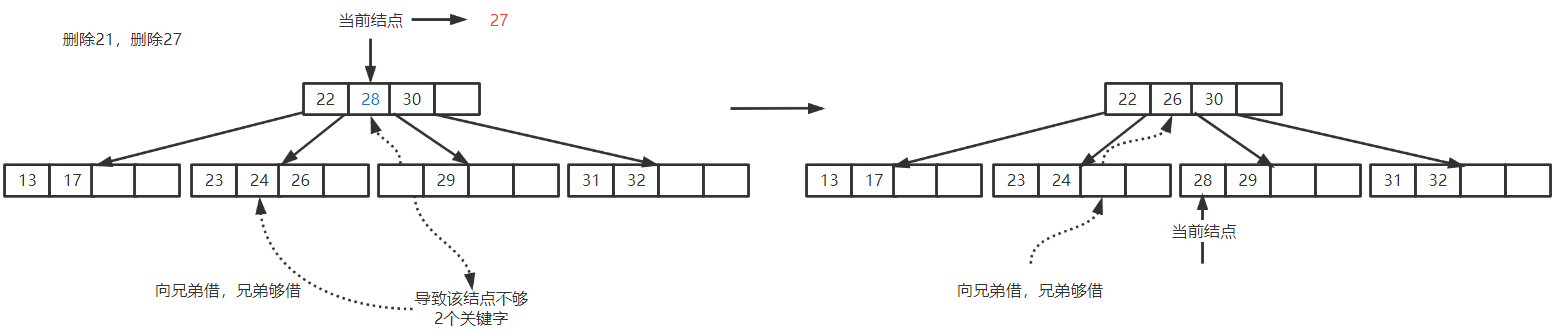
兄弟不够借

5.3.4 B+树
m叉B+树最多m个子树,m个结点最多m+1个
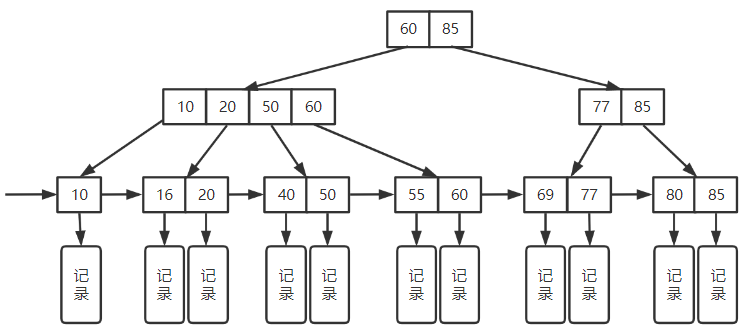
1. 特点
每个分支结点最多 m 个子树
m叉B+树m个子树,每个结点有m个关键字
非叶根结点,至少有两棵子树,其余分支结点有 $\lceil \frac{m}{2} \rceil$ 个子树
所有叶结点包含全部关键字及指向相应记录的指针
相邻叶结点按关键字大小顺序排列
所有非叶分支结点仅包含其子结点的最大关键字值及指针(指向叶结点)
2. 查找
无论查找成功失败,都走到最下一层叶结点
- 分块查找
- 按叶结点顺序查找
3. B+树与文件系统关系
索引块以块为单位存放在磁盘,内存每次以块为单位读写
树越高,读/写 IO次数越多,速度越慢
尽可能使文件系统的树矮,使每个结点包含更多结点
5.3.5 B树与B+树的对比
| B树 | B+树[分块查找] |
|---|---|
| m个关键字m+1棵子树 | m个关键字m棵子树 |
| 根结点关键字数 $n\in [1,m-1]$ 其他结点 $n \in [\lceil \frac{m}{2} \rceil-1,m-1]$ | 根结点关键字数 $n \in [1,m]$ 其他结点 $n \in [\lceil \frac{m}{2} \rceil ,m ]$ |
| 叶结点都在同一层,表示查找失败结点 | 叶包含所有关键字 |
| 各结点关键字不重复,每个结点都含记录存储地址 | 非叶结点关键字是叶结点关键字副本,非叶结点仅起索引作用,指针指向含该最大值的子树 |
5.4 散列结构的查找
5.4.1 基本概念
散列表:建立关键字和存储地址之间的一种直接映射关系
散列函数:把查找表中的关键字映射为该关键字逻辑地址的函数
- Addr = Hash(key)
冲突:一个散列函数会把多个关键字映射到同一地址上
- 同义词:发生碰撞的不同关键字为同义词
5.4.2 散列函数的构造
1. 直接定址法
$H(key) = key$ 或 $H(key) = a*key+b$
适用于关键字基本连续
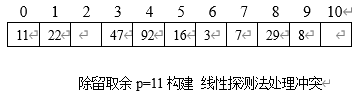
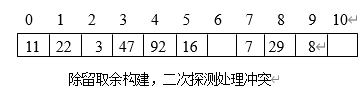
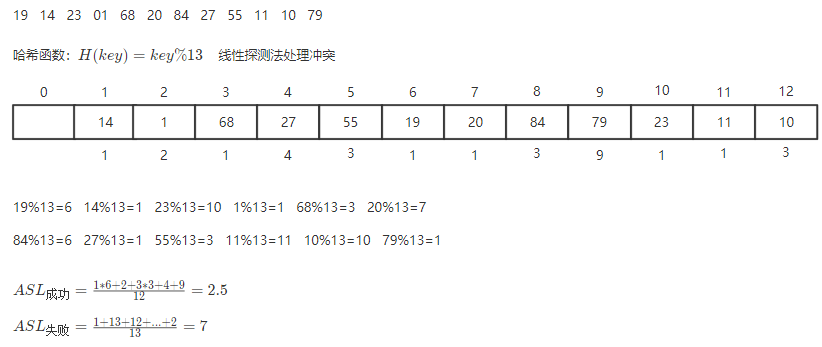
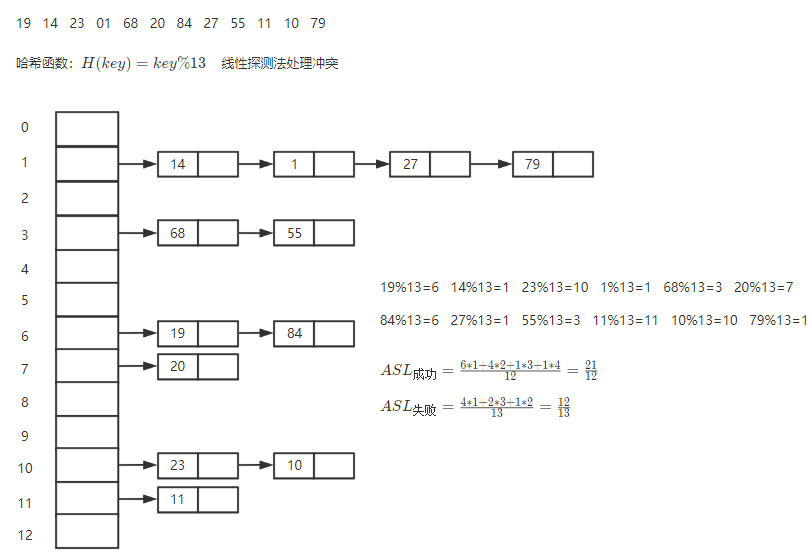
2. 除留取余法
$H(key)=key\%p$
m 为散列表长,p为不大于m的最大质数
3. 数字分析法
关键字是r进制数,r个数码在各数位上出现的频率不同,故选取数码分布较均匀的位作为散列地址
适合已知的关键字集合
4. 平方取中法
取关键字的平方值的中间几位作为散列地址
散列地址与关键字的每位都有关,因此散列地址分布比较均匀
5.4.3 处理冲突的方法
1. 开放定址法
线性探测法
$d_i=1,2,…,k(k \le m-1)$
造成同义词 聚集 在相邻的散列地址,大大降低查找效率
平方探测法
$d_i=0^2,1^2,-1^2,2^2,-2^2,…,k^2,-k^2(k\le \frac{m}{2})$
m必须是一个可以表示为 4k+3 的素数
- 避免出现 堆积问题
- 不能探测散列表所有单元,但至少探测一半
再散列法
$H_i = (H(key)+i*Hash_2(key))\%m$
$初始探测位置H_0=H(key)\%m$ ,i是冲突次数,初始为0
最多经历 m-1 次探测就会遍历表中所有位置,回到 $H_0$
伪随机数法
$d_i=伪随机数序列$
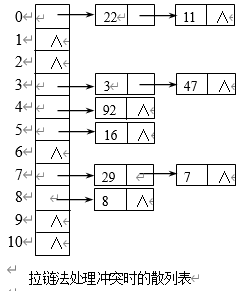
2. 拉链法
同义词以链表形式链接到同一单元后
5.4.4 散列查找和性能分析
1. 平均查找长度
- 开放定址法
- 拉链法
2. 性能分析
装填因子
- 装填因子相关因素:散列函数、冲突解决策略、装填因子
- 平均查找长度与 $\alpha$ 直接相关,不与表中元素数相关
3. 散列表删除某个元素
拉链法:物理删除
开放定址法:待删除位置打标记
- 查找时遇到标记为删除的地址,表示查找失败