[TOC]
6.0 全连接神经网络的缺陷
参数数量太多
输入规模大
图像数据的每个样本(每张图片)都由一个二维像素网格组成,取决于图片的通道数,每个像素位置有多个取值。
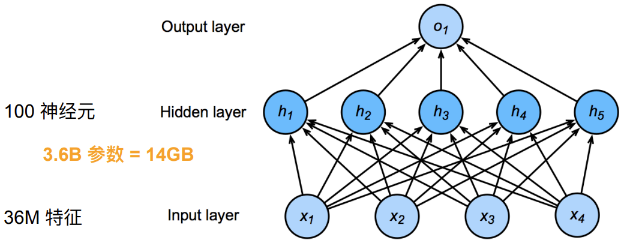
对于一张12M像素的图片,若是RGB,则有36M个像素数据,使用具有100个神经元的单隐藏层MLP,则其参数 $\mathbf{W}\in \mathbb{R}^{100\times 36M}$ ,参数矩阵共 3.6B 个数据需要存储。远远大于一般的待分类物品的种类数
隐藏层神经元数量
随着隐藏层的神经元数量增加,参数规模更会急剧增加
在全连接网络中,第 $l$ 层有 $M_l$ 个神经元,第 $l-1$ 层有 $M_{l-1}$ 个神经元,连接边有 $M_l\times M_{l-1}$ ,即权重矩阵 $W\in \mathbb{R}^{M_l\times M_{l-1}}$ ,当 $M_l$ 和 $M_{l-1}$ 都很大时,权重矩阵的参数会很多,训练的效率会非常低
丢失数据空间结构信息
全连接神经网络将图像展平成一维向量,再将数据送入一个全连接的多层感知机中,而忽略了每个图像的空间结构信息
自然图像中的问题有局部不变性,比如尺寸缩放、平移、旋转等操作不影响语义特征,但全连接的前馈神经网络很难提取这些局部不变的特征——数据增强
最优的结果是利用相近像素之间的相关联性学习有效的模型
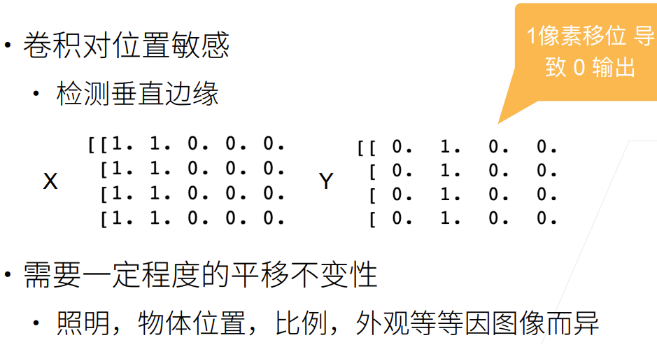
平移不变性 :不管检测对象出现在图像中的哪个位置,神经网络的前面几层都应该对相同的局部区域有相似的反应,即为平移不变性
局部性 :神经网络的前面几层只探索输入图像中的局部区域,而不过度在意图像中相隔较远区域的关系。最后可以聚合这些局部特征,以在整个图像级别进行预测
6.1 卷积层
卷积神经网络 (convolutional neural network,CNN) 是一类强大的、为处理图像数据而设计的神经网络。基于卷积神经网络在计算机视觉领域已经占主导地位。
6.1.1 卷积层对数据空间结构信息的提取
全连接层到卷积层
输入和输出:从一维张量变为二维矩阵
权重从二维张量变为四维张量
全连接网络中,输入是一维张量,输出也为一维张量,参数矩阵为一个二维矩阵
$h_i=\sum\limits_jw_{i,j}x^{(j)}+b_i$
若使用全连接神经网络处理输入和输出都是二维张量的数据,则其参数矩阵应该是四维张量。假设相当于对一维张量的全连接神经网络等价替换,将 $h_{i}$ 替换为 $[\mathbf{H}]_{i,j}$ ,输入数据 $x^{(j)}$ 替换为 $[\mathbf{X}]_{k,l}$ , $w_{i,j}$ 相应被替换为 $w_{i,j,k,l}$ ,所以二维输入输出的全连接神经网络为
$\mathbf{V}$ 是 $\mathbf{W}$ 的重排索引
对于隐藏层的任意净输出元素 $[\mathbf{H}]_{i,j}$ ,可以通过以 $[\mathbf{X}]_{i,j}$ 为中心对像素进行加权求和得到,权重为 $[\mathbf{V}]_{i,j,a,b}$
卷积滤波器的平移不变性
若采用上述分类器,当检测对象 $[\mathbf{X}]_{i,j}$ 在图像输入 $\mathbf{X}$ 中的位置发生平移,则仅会导致隐藏层净输出 $[\mathbf{H}]_{i,j}$ 发生平移而取值不会发生变化,即 $\mathbf{V}$ 和 $\mathbf{B}$ 并不依赖于 $(i,j)$ 的值,即 $[\mathbf{V}]_{i,j,a,b}=[\mathbf{V}]_{a,b}$ ,且 $[\mathbf{B}]_{i,j}$ 是一个常数 $b$
也就是二维卷积 / 交叉相关(数学),使用系数 $[\mathbf{V}]_{a,b}$ 对位置 $(i,j)$ 附近的像素 $[\mathbf{X}]_{i+a,j+b}$ 进行加权得到 $[\mathbf{H}]_{i,j}$
卷积神经网络考虑到了局部特征的平移不变性,所以 $[\mathbf{V}]_{a,b}$ 的系数比全连接神经网络的系数 $[\mathbf{W}]_{i,j,a,b}$ 的数量少很多
卷积滤波器的局部性
为了收集用来训练隐净输出 $[\mathbf{H}]_{i,j}$ 的相关信息,我们不应该偏离距 $(i,j)$ 很远的地方,也就是当 $\vert a\vert,\vert b\vert>\Delta$ 时,$[\mathbf{V}]_{a,b}=0$ 。因此,可以将 $[\mathbf{H}]_{i,j}$ 重写为
卷积层特点
卷积神经网络是一种深层前馈神经网络,结构特性:
局部连接:与全连接的前馈神经网络相比,卷积神经网络的参数很少
权重共享
空间或时间上的次采样:能够高效地采样从而获得精确的模型
能够高效地计算:卷积很容易用GPU并行计算
GPU擅长进行浮点数运算
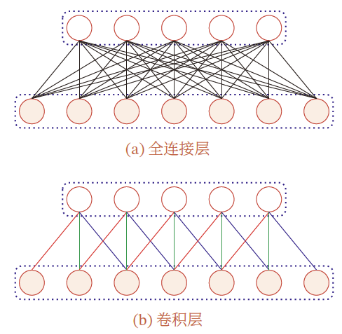
局部连接 :在卷积层第 $l$ 层中的每个神经元只与第 $l-1$ 层在滑动窗口内的部分神经元相连,构成一个局部连接网络
- 卷积层参数的数量大大减少,由 $M_l\times M_{l-1}$ 个连接变为 $M_l\times K$ 个连接,$K$ 为卷积核大小
权重共享:作为参数的卷积核 $\mathbf{W}_l$ 对于第 $l$ 层所有的神经元都是相同的。一个卷积核只提取输入数据中的一种特定的局部特征,若提取不同的特征,需要使用不同的卷积核
由于 局部连接 和 权重共享 的特点,一维卷积层的参数只有一个 $K$ 维的权重 $\mathbf{w}_l$ 和 1个偏置 $b_l\in \mathbb{R}$ ,即 $K+1$ 个参数
卷积滤波器的代价
卷积神经网络是包含卷积滤波器的一种特殊神经网络,$\mathbf{V}$ 被称为卷积核(convolution kernel)或滤波器或卷积层权重,权重是可以被学习的参数。
特征必须是平移不变的,并且当确定每个隐藏活性值时,每一隐藏层只包含局部的信息,只有输出层才是完整的信息。
因此卷积神经网络的权重学习依赖于归纳偏置,如图像不满足平移不变时,可能难以拟合训练数据
6.1.2 卷积运算
在信号处理和图像处理中,常用的是一维或二维卷积
一维卷积
一维卷积常用于信号处理中,用于计算信号的延迟累积
$w_i$ 称为滤波器或卷积核,假设滤波器的长度为 $K$ ,它和一个信号序列 $x_1,x_2,\cdots$ 的卷积为
- 一般情况下,滤波器的长度 $K$ 远小于信号序列 $x$ 的长度
如:假设一个信号发生器每个时刻 $t$ 产生一个信号 $x_t$ ,其信息的衰减率为 $w_k$ ,在 $k-1$ 个时间步长后,信息变为原先的 $w_k$ 倍
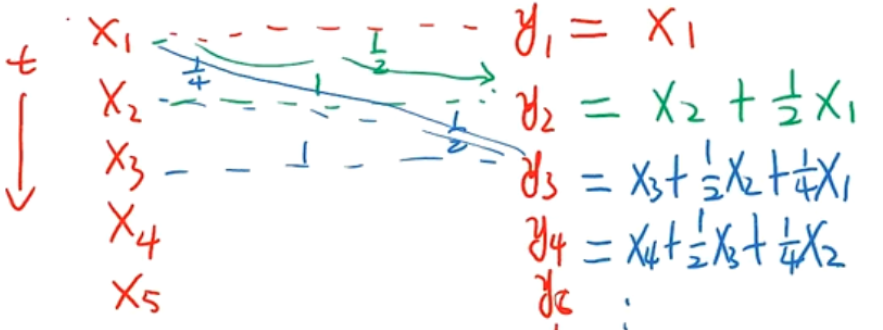
在时刻 $t$ 收到的信号 $y_t$
二维卷积
图像是二维结构,需要将一维卷积进行扩展
给定一个图像 $\mathbf{X}\in \mathbb{R}^{n_h\times n_w}$ 和一个滤波器 $\mathbf{W}\in\R^{k_h\times k_w}$ ,一般 $k_h\ll n_h,k_w\ll n_w$ ,其卷积为
二维卷积运算是翻转相乘
上下翻转,左右翻转
- 相当于在一个平面内,以 $e$ 为中心,旋转 $180^{\circ}$
再逐项相乘并求和
互相关
互相关是衡量两个序列相关性的函数,通常用滑动窗口的点积计算来实现
一个图像 $\mathbf{X}\in \mathbb{R}^{n_h\times n_w}$ 和卷积核 $\mathbf{W}\in \mathbb{R}^{k_h\times k_w}$ ,互相关为
互相关——不翻转核的卷积
- 与卷积的区别在于卷积核是否翻转
互相关代替卷积
在计算二维卷积的过程中,需要进行卷积核翻转,卷积神经网络的实现中,一般会以互相关操作来代替卷积
两种运算的运算矩阵在数学意义上是翻转对称的(上下翻转、左右翻转)
在计算机中,用矩阵乘法实现卷积运算需要先进行翻转再相乘,后续计算与二维互相关运算相等,所以在深度神经网络中求解的是参数的值,在实际使用上并没有区别。即卷积核是否翻转与其特征提取能力无关,二维卷积与互相关在能力上是等价的
- 通过互相关学习到的卷积核权重 $\mathbf{K}$ 与执行严格卷积运算学习到的卷积核权重 $\mathbf{K}’$ ,$\mathbf{K}’$ 翻转后就是 $\mathbf{K}$
卷积应用
一维卷积
近似微分
当令滤波器 $w=\left[\frac{1}{2},0,-\frac{1}{2}\right]$ 时,可以近似信号序列的一阶微分
- $f’(x)=\lim\limits_{\varepsilon\rightarrow 0}\frac{f(x+\varepsilon)-f(x-\varepsilon)}{2\varepsilon}$
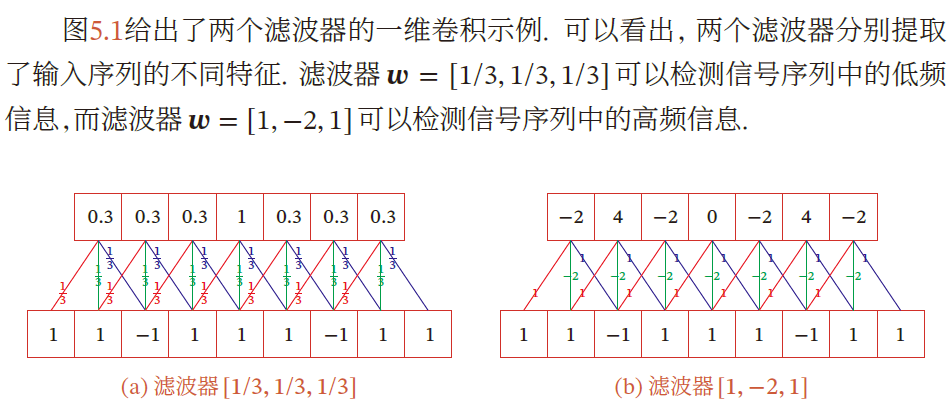
二阶微分,即当滤波器为 $w=[1,-2,1]$ 时,可近似实现对信号序列的二阶微分
低通滤波器/高通滤波器
二维卷积
常见滤波器
均值滤波 将当前位置的像素值设为滤波窗口中所有像素的平均值 $w_{ab}=\frac{1}{AB}$
高斯滤波器 :用于对图像平滑去噪
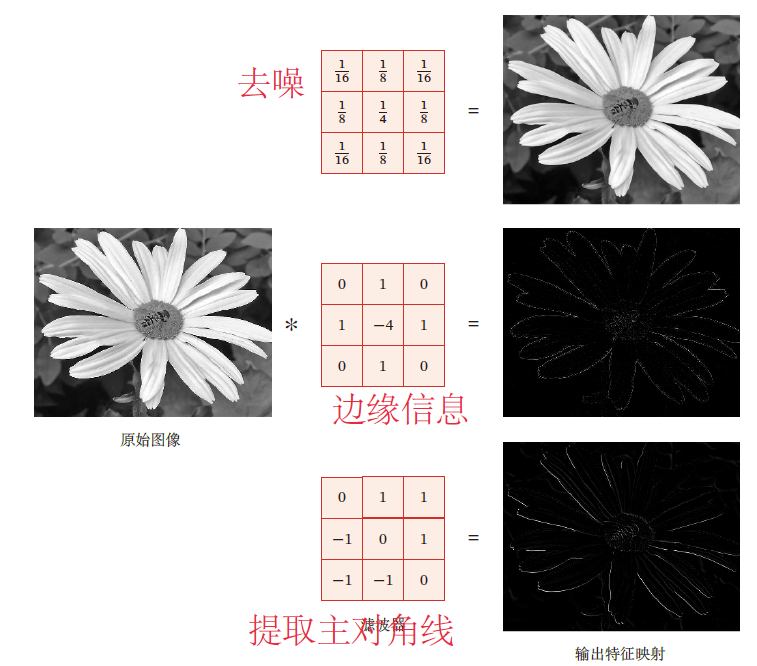
边缘滤波器,提取边缘特征
6.1.3 卷积核大小与输出
特征映射
卷积的功能是在一个图像(或某种特征)上滑动一个卷积核(滤波器),通过卷积运算得到一组新的特征——一种局部特征提取的方法
卷积核可以被视为从输入映射到下一层的空间维度的转换器
卷积层的输出被称为 特征映射 ,每个特征映射可作为一类从原始图像中抽取的图像特征
使用不同的卷积核可以得到同一数据的不同特征映射
核大小与输出大小
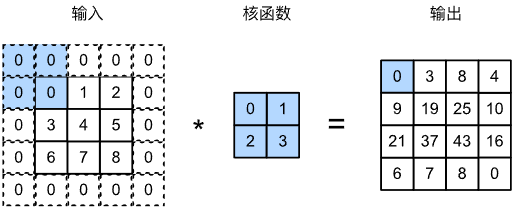
在卷积层中,输入张量和核张量通过互相关产生输出张量
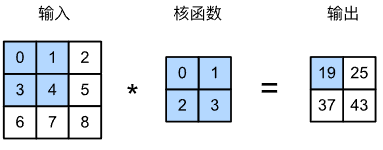
- 在二维互相关运算中,卷积窗口从输入张量的左上角开始,从左到右、从上到下滑动
- 当卷积核窗口滑动到输入的一个新位置,包含在该窗口内的部分张量与卷积核张量进行按元素乘,得到的张量再求和得到输出张量中的一个元素
输出大小略小于输入大小,输入高宽 $n_h\times n_w$ ,卷积核高宽 $k_h\times k_w$ ,输出大小为
6.1.4 卷积层与卷积核实现
定义互相关运算
1 | import torch |
验证互相关运算
1 | X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]]) |
卷积层
卷积层对输入与卷积核进行互相关运算,在添加标量偏置后产生输出
在卷积层中两个被训练的参数为卷积核与偏置
1 | class Conv2D(nn.Module): |
将带有 $h\times w$ 卷积核的卷积层称为 $h\times w$ 卷积层
应用于目标边缘检测
构造有边缘的单通道灰度图
1 | X = torch.ones((6, 8)) |
- 图像边缘为 1-0,0-1,即
X[,1]与X[,6]
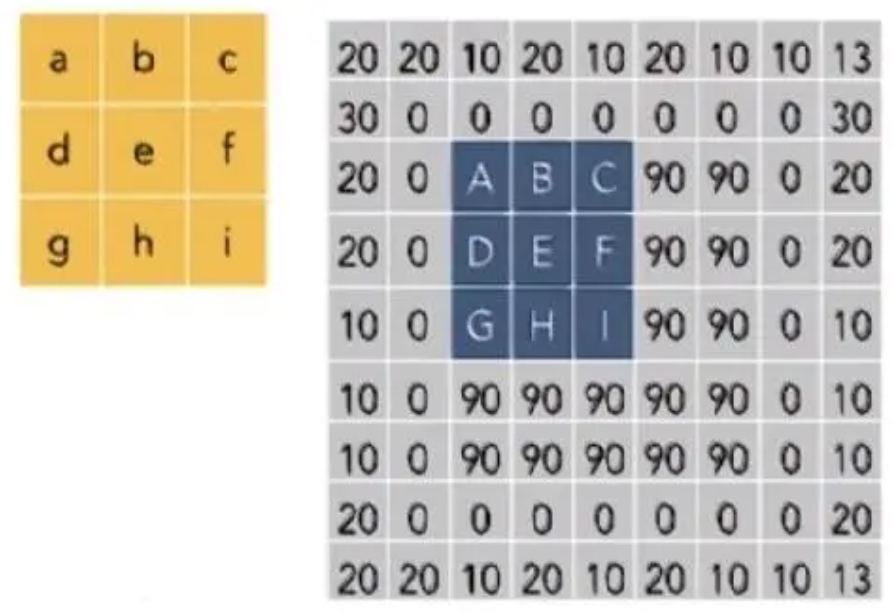
构造 $1\times 2$ 卷积核进行互相关运算,若水平相邻的两元素相同,则输出为零;对于图像边界,输出为1
1 | K = torch.tensor([[1.0, -1.0]]) |
执行互相关运算
1 | Y = corr2d(X, K) |
- $Y$ 中1表示白色到黑色边缘,-1表示黑色到白色边缘
这个卷积层只能检测垂直边缘,无法检测水平边缘
参数学习
通过 输入-输出 学习由 $X$ 生成 $Y$ 的卷积核
- 将卷积核初始化
- 每轮迭代,比较 $Y$ 与卷积输出 $\hat{Y}$ 的平方误差,通过梯度更新卷积核
1 | # 构造一个二维卷积层,它具有1个输出通道和形状为(1,2)的卷积核 |
1 | lr = 3e-2 # 学习率 |
在10轮迭代后,误差已经降到足够低,学习到的卷积核权重张量
1 | conv2d.weight.data.reshape((1, 2)) |
6.1.5 卷积核与感受野机制
感受野机制:听觉、视觉等神经系统中的一些神经元,只接受其所支配的刺激区域内的信号
- 一个视觉皮层的神经元的感受野指视网膜上的特定区域,只有这个区域内的刺激才能激活该神经元
在神经网络中,对于某一层的任意元素 $x$ ,其 感受野 指在前向传播过程中可能影响 $x$ 取值的所有元素(来自所有先前层)
感受野可能大于输入的实际大小
19的感受野是输入阴影部分的四个元素,假设输出 $\mathbf{Y}$ ,其后再添加一个卷积层,输出单个元素 $z$ ,$z$ 的感受野除 $\mathbf{Y}$ 上的四个元素之外,还有输入 $\mathbf{X}$ 上的9个元素
因此,当特征图中的任意元素需要检测更广区域的局部特征时,可以构建更深的网络
6.2 卷积层超参数
卷积输出的形状取决于输入形状与卷积核形状,同时也取决于超参数的设置,步长和填充是控制卷积层输出大小的两个超参数
为什么需要填充:在连续应用多次卷积后,我们最终得到的输出远小于输入大小——卷积核通常大于1
- 一个 $240\times 240$ 像素的图像,经过10层 $5\times 5$ 的卷积后,将减少到 $200\times 200$ 像素
这样,原始图像的边界丢失了很多有用信息,填充是解决此问题的有效方法
而对于原始的输入分辨率十分冗余的情况下,增大步幅可以快速降低图像的宽度和高度
填充(慢缩放):在 输入 的边界进行零填充,使卷积层输出变大
输入规模小,又想用深的网络
输入数据对称,则会使用对称填充
步幅(快缩放):使卷积层输出变小
- 输入规模大,使输入规模成倍减少,减少计算量
6.2.1 一维卷积上的填充与步幅
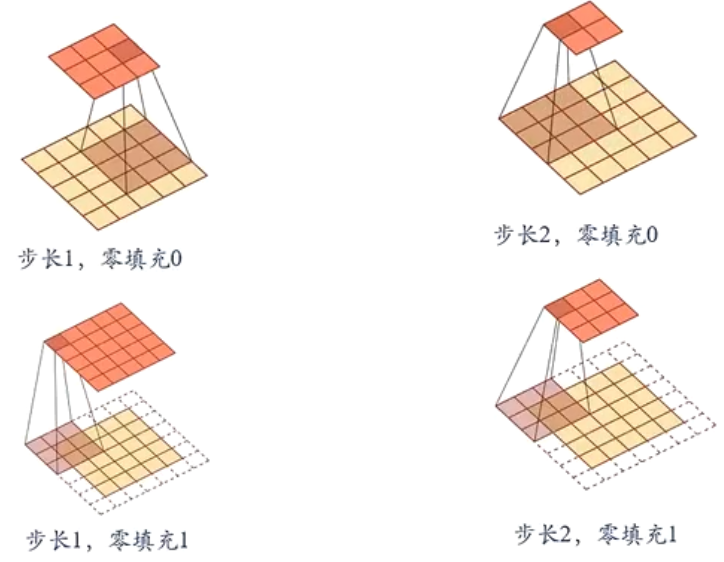
在卷积的标准定义基础上,还可以引入卷积核的 滑动步长 (stride) 和 零填充(zero padding) 来增加卷积的多样性
步长S:卷积核在滑动时,滑动窗口的间隔;滑动窗口在一个时间间隔后滑动S个数据
- 增加步长,减少输出长度
零填充:在输入向量的两端补零
- 增加填充,增加输出长度
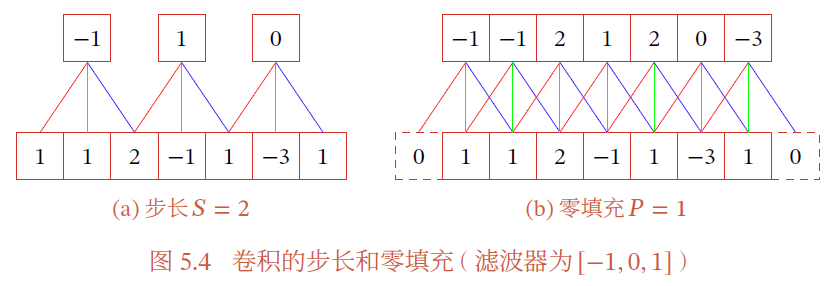
假设卷积层的输入神经元个数为 $N$ ,卷积大小为 $K$ ,步长为 $S$ ,在输入两端分别补 $\frac{P}{2}$ 个零,那么该卷积的神经元数量为 $\frac{N-K+P}{S}+1$
- 窄卷积:$S=1$ ,$P=0$ ,卷积后输出长度为 $N-K+1$
- 等宽卷积:$S=1$ ,$P=K-1$ ,卷积后输出长度为 $N$
- 宽卷积:$S=1$,$P=2K-2$,卷积后输出长度为 $N+K-1$
6.2.2 二维卷积上的填充与步幅
填充
在输入图像的边界填充元素,若进行 $p_h$ 行填充和 $p_w$ 列填充,相当于输入的行列分别增加 $p_w$ 和 $p_h$
- 通常在行列上平均 $p_h$ 和 $p_w$ 个填充,即 $\frac{p_h}{2}$ 在顶部,$\frac{p_h}{2}$ 个填充在底部
则输出形状变为
通常,我们希望一次卷积后,不损失信息,即输入输出形状相等。因此,将填充设置为 $p_h=k_h-1,p_w=k_w-1$ 可使输入和输出形状相同
卷积核的高和宽通常为奇数,选择奇数的好处是上下和左右填充数相等
- 若 $k_h$ 是奇数,则在上下填充 $\frac{p_h}{2}$ 行
- 若 $k_h$ 为偶数,一种情况是上添加 $\lceil \frac{p_h}{2}\rceil$ 行,下添加 $\lfloor \frac{p_h}{2}\rfloor$
若输入和输出具有相同高度,卷积核的大小是奇数且上下、左右填充数相等,则 Y[i,j] 可以视为以输入 X[i,j] 为中心与卷积核进行互相关运算得到的
实现
创建 $3\times 3$ 的二维卷积核,进行 $p_h=p_w=2$ 的零填充,输入的高宽为 $8\times 8$
1 | import torch |
同样,由于输入的宽高不同,所以也会使用高度和宽度不同的卷积核,这是可以 高度和宽度 分别进行不同数量的填充
1 | conv2d = nn.Conv2d(1, 1, kernel_size=(5, 3), padding=(2, 1)) |
步幅
在计算互相关时,卷积核窗口从输入张量的左上角开始,向下、向右滑动。每次默认滑动一个窗口,可以通过设置 步幅 (stride)超参数,每次滑动多个元素
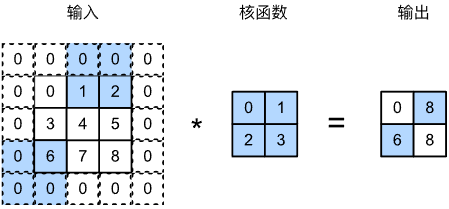
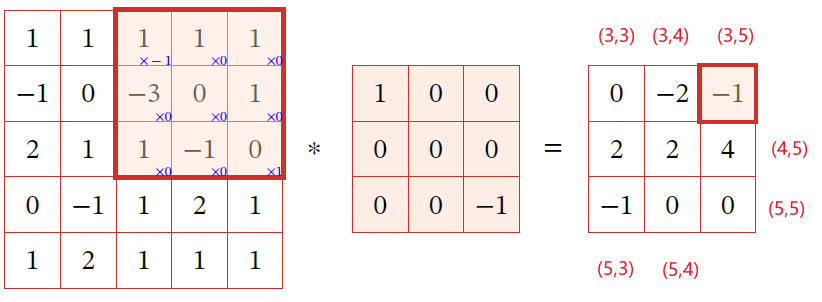
如图所示,计算 $[\mathbf{Y}]_{1,2}$ 后再计算 $[\mathbf{Y}]_{2,1}$ 时,滑动窗口向下滑动3个元素,向左滑动2个元素,即图中进行的运算是
- 对输入进行 $p_h=p_2=2$ 的零填充
- 垂直步幅为3,水平步幅为2的二维互相关运算
若设置垂直填充与水平填充为 $p_h,p_w$ ,垂直步幅与水平步幅为 $s_h,s_w$ 时,输出形状为
若填充为 $p_h=k_h-1$ ,$p_w=k_w-1$ ,则输出形状为 $\bigg\lfloor \frac{n_h+s_h-1}{s_h}\bigg\rfloor\times \bigg\lfloor\frac{n_w+s_w-1}{s_w}\bigg\rfloor$ 。此时,若输入高度和宽度可以被垂直和水平步幅整除,则输出形状为 $\frac{n_h}{s_h}\times\frac{n_w}{s_w}$
1 | # 填充为2=卷积核-1;且输入可被步长整除 |
简写
为简洁表达,当输入高度和宽度两侧的填充数量分别是 $p_h$ 和 $p_w$ 时,我们称之为填充 $(p_h,p_w)$ 。当 $p_h=p_w=p$ 时,我们称填充为 $p$
当垂直步幅和水平步幅分别为 $s_h$ 和 $s_w$ 时,我们称之为步幅 $(s_h,s_w)$ 。当 $s_h=s_w=s$ 时,称步幅为 $s$
- 窄卷积:$p_h=p_w=0$ ,$s_h=s_w=1$ ,卷积后输出形状为 $(n_h-k_h+1)\times (n_w-k_w+1)$
- 等宽卷积:$s_h=s_w=1$ ,$p_h=k_h-1,p_w=k_w-1$ ,卷积后输出长度为 $n_h\times n_w$
- 宽卷积:$s_h=s_w=1$,$p_h=2(k_h-1),p_w=2(h_w-1)$,卷积后输出长度为 $(n_h+k_h-1)\times (n_w+k_w-1)$
卷积与互相关运算的交换性
- 数学上,$*$ 表示卷积运算,$\otimes$ 表示互相关与运算
- 但在
torch中,$$ 表示矩阵乘时,运算结果与互相关运算结果一致,所以此处用 $$ 表示互相关运算,$\otimes$ 表示卷积
交换性:$x\otimes y=y\otimes x$
二维图的宽卷积具有交换性
- 二维宽卷积:二维图像 $X\in \mathbb{R}^{n_h\times n_w}$ 和 二维卷积核 $W\in \mathbb{R}^{k_h\times k_w}$ ,对 $X$ 进行零填充,两端各补 $k_h-1$ 个零和 $k_w-1$ 个零,得到全填充的图像 $\tilde{X}\in \mathbb{R}^{(n_h+2k_h-2)\times (n_w+2k_w-2)}$
图像 $X$ 和卷积核 $W$ 的宽卷积定义为
当输入信息和卷积核有固定长度时,他们的宽卷积具有交换性,
由于卷积与互相关运算的区别只有是否翻转卷积核,相应的宽互相关也有交换性
6.2.3 通道
多输入通道
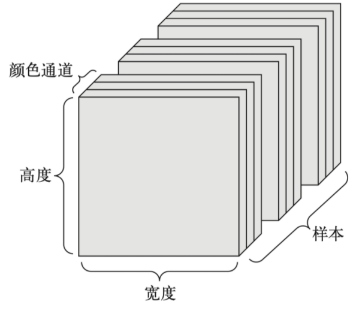
图像实质上一般包含三个通道 / RGB ,即一张图片是 $颜色\times 高度\times 宽度$ 组成的三维张量
直观上,可以将一个三维张量想象为一系列二维张量堆叠成的通道。
后两个维度表示像素的空间位置,第一个维度看作每个像素的多维表示
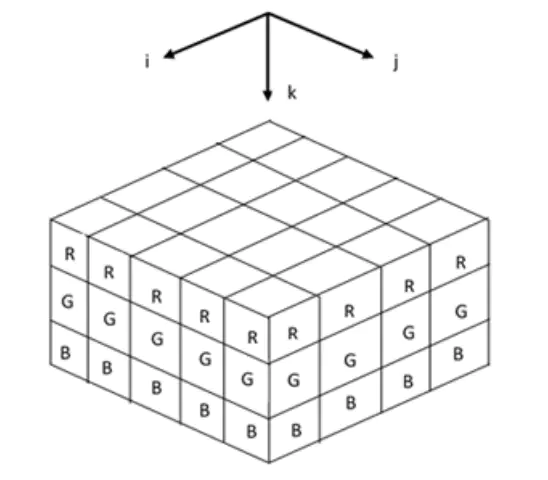
一个通道为后续层提供一种空间化的学习特征
所以实际上一张图片表示为 $[\mathbf{X}]_{c_i,n_h,n_w}$ ,卷积核也应该相应调整为 $[\mathbf{V}]_{c_i,a,b}$
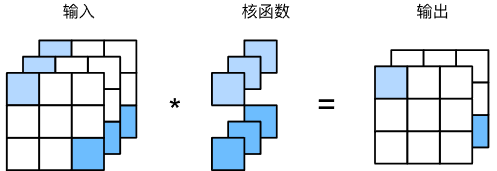
由于输入和卷积核都有 $c_i$ 个通道
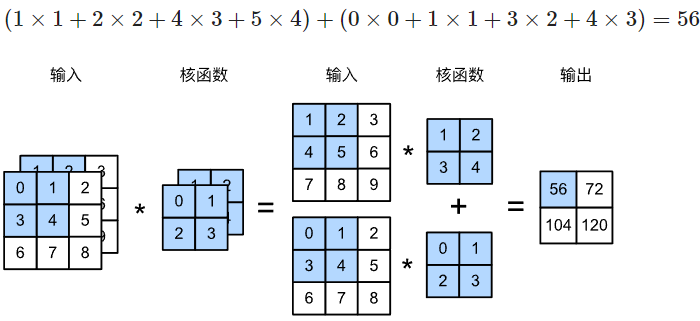
- 对每个通道输入的二维张量 $\mathbf{X}_{n_h\times n_w}$ 与该通道的卷积核 $K_{k_h\times k_w}$ 进行互相关运算,并加偏置 $[\mathbf{b}]_d\in \mathbb{R}$
- 对 $c_i$ 个通道互相关运算的结果求和,得到一个二维张量 $\mathbf{H}_{(n_h-k_h+1)\times(n_w-k_w+1)}$
1 | import torch |
多输出通道
实际上,我们会同时获取同一张图片的不同空间化特征,如:在靠近输入的底层,一些通道专门识别边缘、一些通道识别纹理特征。即输入是多通道的 $c_i\times n_h\times n_w$ ,卷积层输出也是多通道的 $c_o\times m_h\times m_w$ , 因此,每个空间化特征应该设计各自的卷积核,即 $c_o$ 个 $c_i\times k_h\times k_w$ 的卷积核
每层的通道都会为后续层提供一组空间化的学习特征
为了支持输入 $\mathbf{X}$ 和隐藏层 $\mathbf{H}$ 中的多个通道,卷积核需要再增加一维表示不同通道
其中,
1 | def corr2d_multi_in_out(X, K): |
简单的将核张量 K、K+1、K+2 作为第零、第一、第二输出通道的卷积核
1 | K = torch.stack((K, K + 1, K + 2), 0) |
torch.stack(inputs, dim=?),假设len(inputs)=l,且输入元组的每个元素形状都是 $m\times n$ ,则对于
1
2T1 = torch.tensor([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
T2 = torch.tensor([[10, 20, 30], [40, 50, 60], [70, 80, 90]])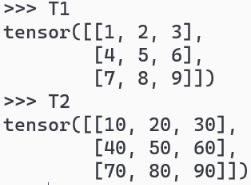
dim=0则输出形状为 $l\times m\times n$1
2
3
4
5
6
7
8torch.stack((T1,T2),dim=0)
tensor([[[ 1, 2, 3],
[ 4, 5, 6],
[ 7, 8, 9]],
[[10, 20, 30],
[40, 50, 60],
[70, 80, 90]]])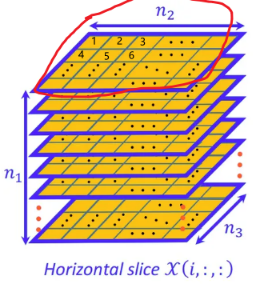
dim=1则输出形状为 $m\times l\times n$1
2
3
4
5
6
7
8
9torch.stack((T1,T2),dim=1)
tensor([[[ 1, 2, 3],
[10, 20, 30]],
[[ 4, 5, 6],
[40, 50, 60]],
[[ 7, 8, 9],
[70, 80, 90]]])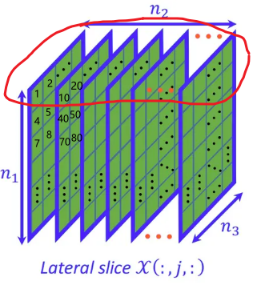
dim=2则输出形状为 $m\times n\times l$1
2
3
4
5
6
7
8
9
10
11
12torch.stack((T1,T2),dim=2)
tensor([[[ 1, 10],
[ 2, 20],
[ 3, 30]],
[[ 4, 40],
[ 5, 50],
[ 6, 60]],
[[ 7, 70],
[ 8, 80],
[ 9, 90]]])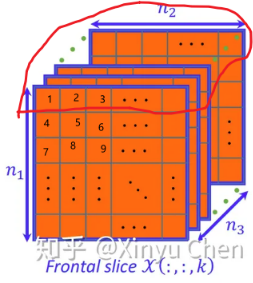
dim指定了新维度的位置
总结
卷积核:高度和宽度维度上识别相邻元素间相互作用
输出通道:每个输出通道输出各自通道可以识别的特定局部特征
输入通道:对局部特征的组合——相加
越底层,识别的特征越局部;随着网络层数的加深,组合的特征数越来越多,越接近真实结果
- 从感受野机制理解,越底层,感受野越小,识别的局部特征越小;越顶层,其感受野越大,识别并组合的局部特征越多,越接近真实的输出
1维卷积
$k_h=k_w=1$ 的卷积核,可以实现同一元素位置上信息的跨通道组合
1维卷积应用在每个像素位置的不同通道相当于输入形状为 $n_hn_w\times c_i$ 权重为 $c_o\times c_i$ 的全连接层
以 $c_i$ 个输入值转换为 $c_o$ 个输出值,所以 $1\times 1$ 卷积层需要权重维度为 $c_o\times c_i$
1 | def corr2d_multi_in_out_1x1(X, K): |
$1\times 1$ 卷积核的作用
降维/升维
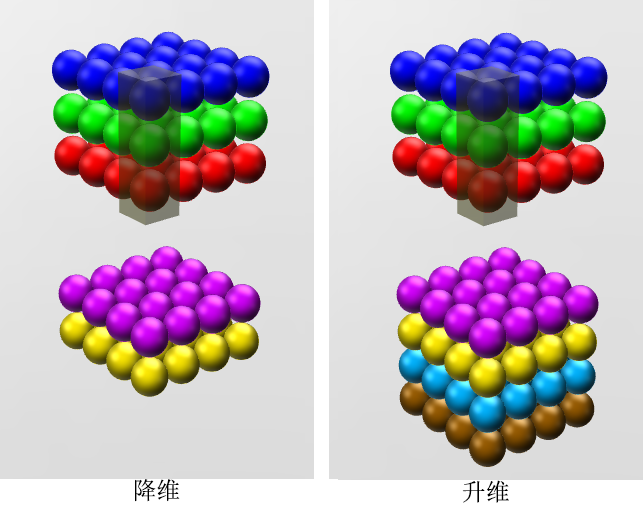
$1\times 1$ 的卷积核不会改变宽度和长度,直观看可以改变深度,即通道数
降维:可以通过减少通道数来减少参数,进而可以进行数据的降维处理
- 假设有一个 $M\times N\times 3$ 的图像,通过 $1\times 1\times 3\times 2$ ($D=3,P=2$ ) 的卷积核处理,得到 $M\times N\times 2$ 的特征映射,达到降维目的
升维:同样可以通过增加通道数来增加参数,对数据进升维处理
- 同样的输入,经过 $1\times 1\times 3\times 4$ 的卷积核处理,得到 $M\times N\times 4$ 的特征映射,达到升维的目的
跨通道信息整合
使用 $1\times 1$ 的卷积核,实现降维和升维的操作其实是利用通道间信息的线性组合,
$3\times 3\times 64$ 的输入,经过 $1\times 1\times 64\times 28$ 的卷积核,就变成了 $3\times 3\times 28$ 的输出,可以理解为原来的64个通道的输入跨通道线性组合变成了28个通道,这就是通道间的信息交互
减少计算量
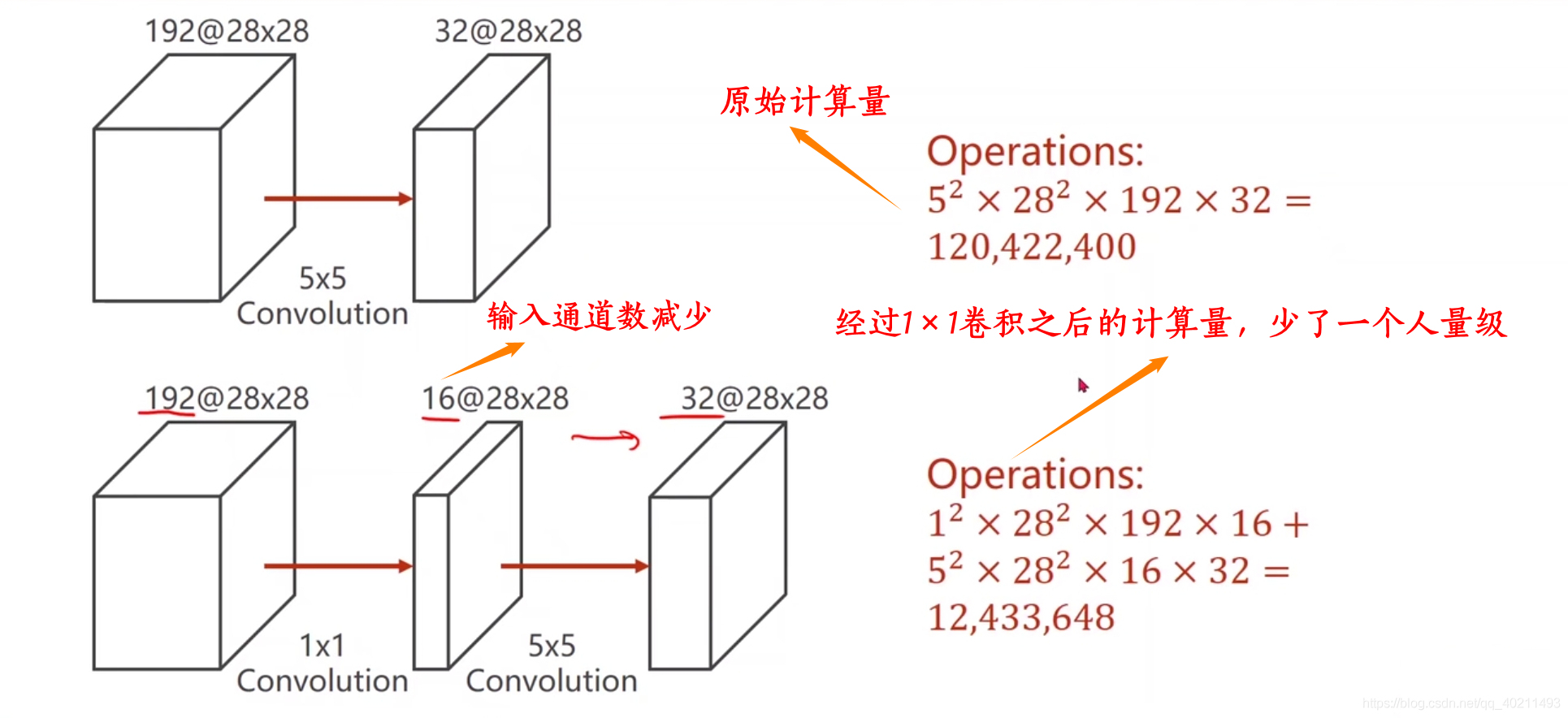
原先:
$Z^{(l,p)}=\sum\limits_{d=1}^DW^{(l,p,d)}\otimes X^{(l-1,d)}+b^{(l,p)}$ ,对于一次卷积,需要经过 $M’\times N’\times U\times V$ 次乘法,故若要计算上述输入特征映射,需要 $P\times D\times M’\times N’\times U\times V=32\times 192\times 5^2\times 28^2$
增加网络的深度,添加非线性,增强神经网络的表达能力
增加网络深度好处:卷积核越大,网络的深度也就增加。随着网络深度的增加,越靠后的特征图上的节点感受野也越大。因此特征也越来越形象,也就是更能看清这个特征是个什么东西。层数越浅,就越不知道这个提取的特征到底是个什么东西。
添加非线性:想在不增加卷积核大小的情况下,让网络加深,可以加一层 $1\times 1$ 的卷积核,在不改变输入规模的情况下,一个卷积层包含激活和池化,相当于多了一个非线性的激活函数,如 $ReLU$ 和 $Sigmod$
卷积层之后经过激励层,经过卷积核得到的特征映射,可以添加非线性激活函数,提高网络的表达能力
6.2.4 二维卷积层一般形式
二维卷积层的一般形式
时间复杂度
对于每个输出 $[\mathbf{H}]_{i,j}$ ,需要在 $c_i$ 个通道上分别进行 $k_h\times k_w$ 次乘法,每个输出通道有 $m_h\times m_w$ 个元素,共有 $c_o$ 个通道,所以计算时间复杂度为 $O(c_o\times c_i\times k_h\times k_w\times m_h\times m_w)$ 次浮点数运算
如:$c_i=c_o=100$ ,$k_h=k_w=5$,$m_h=m_w=64$ ,则需要进行 $1024\times 10^6=1GFLOP$
若有10层卷积层,样本数量为1M,前向运算则需要 $10P$ 次浮点数运算
CPU每秒大约0.15T次浮点数运算,大约需要18h
GPU每秒大约12T次浮点数运算,大约需要14min
6.3 卷积神经网络
CNN结构:卷积层;汇聚层;
6.3.1 结构
卷积层
输入:$\mathbf{X}\in \mathbb{R}^{c_i\times n_h\times n_w}$ ,每个输入通道的数据 $[\mathbf{X}]_{d}$ 为一个输入分量,$d\in [1,c_i]$
输出:$\mathbf{Y}\in \mathbb{R}^{c_o\times m_h\times m_w}$ ,每个输出通道的数据 $[\mathbf{Y}]_{p}$ 为一个输出分量,$p\in [1,c_o]$
卷积核:$\mathbf{W}\in \mathbb{R}^{c_o\times c_i\times k_h\times k_w}$ ,对于一个输出通道上的输出 $[\mathbf{Y}]_{p}$ ,各输入通道都对应一个 $k_h\times k_w$ 的卷积核 $[\mathbf{W}]_{p,d}$
- 每个卷积核都对应一个实数偏置,即 $[\mathbf{B}]_{p,d}\in \mathbb{R}$
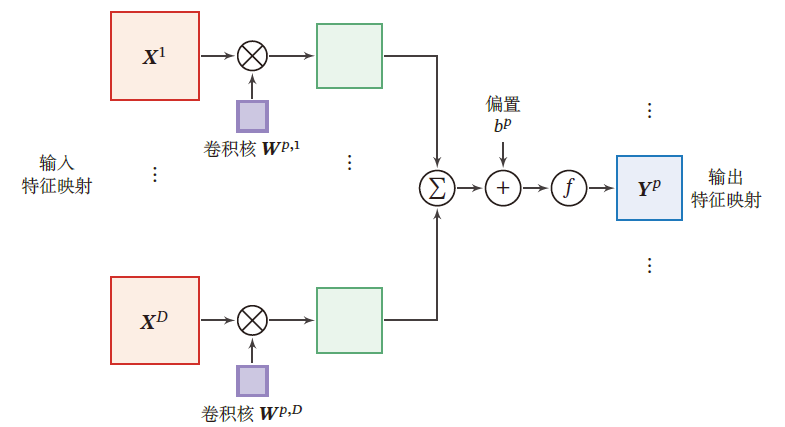
即输出层的一个特征映射为
所以 输入通道和输出通道间的特征映射是全连接的
卷积核
卷积核 $\mathbf{W}\in\R^{c_o\times c_i\times k_h\times k_w}$ 为四维张量,其中每个切片矩阵 $[\mathbf{W}]_{p,d}$ 为一个二维卷积核,$p\in [1,c_o],d\in [1,c_i]$
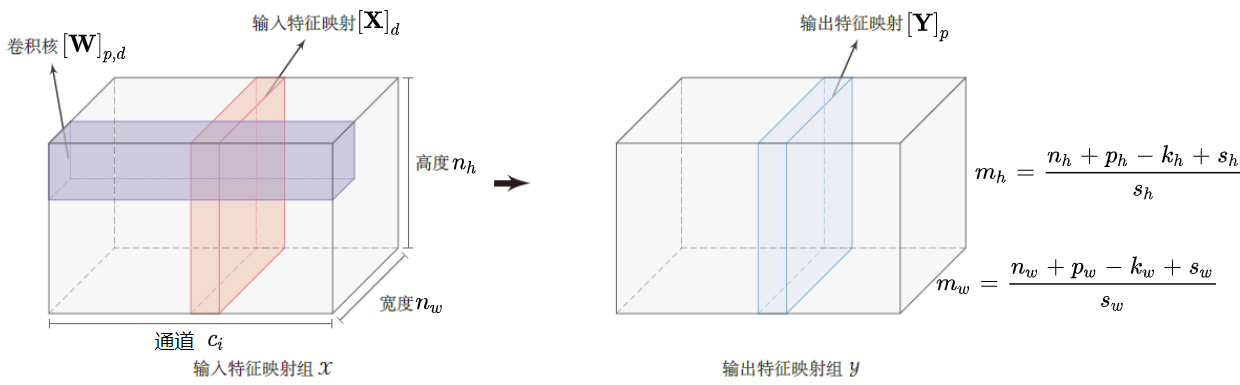
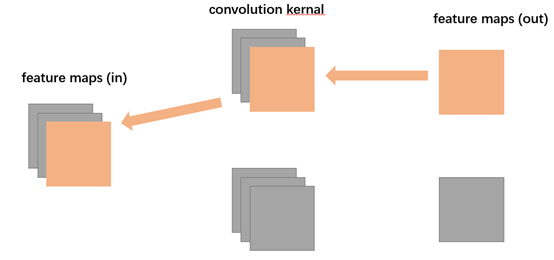
一个输出通道上的值 $[\mathbf{Y}]_p$ 需要该输出通道对应的 $c_i$ 个输入通道上的卷积核 $[\mathbf{W}]_{p,d}$ 与输入通道的 $c_i$ 个分量分别卷积
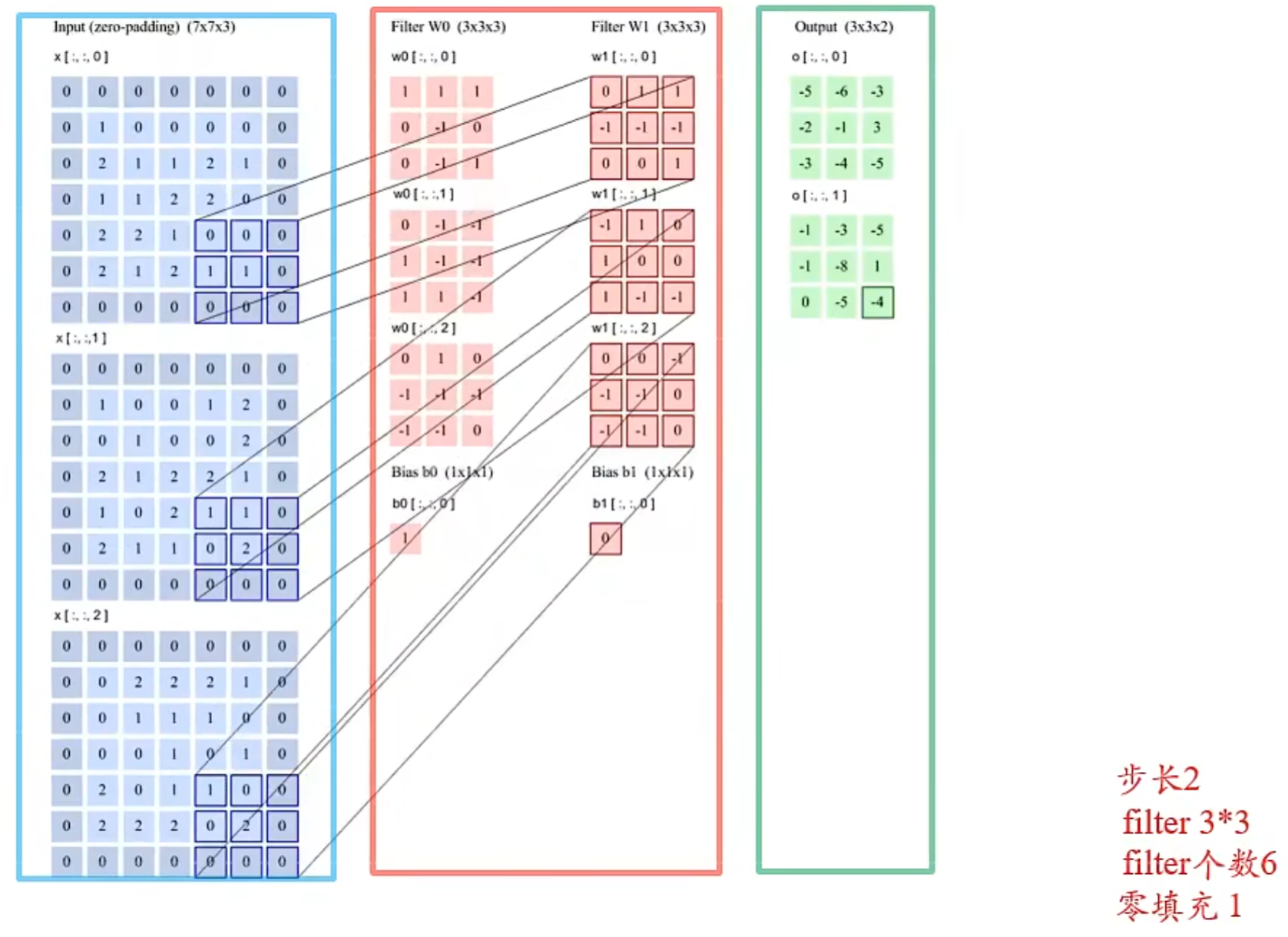
图上画的是一次卷积过程,实际上要得到蓝色的输出矩阵需要 $c_i$ 次卷积运算,所以输入特征应该是 $c_i$ 个粉矩阵才对,图有点问题
展开是这么个过程,2个输出通道,3个输入通道 $[\mathbf{X}]_{d}\in \mathbb{R}^{5\times 5}$ ,所以有 $c_o\times c_i=2\times 3=6$ 个卷积核 $[\mathbf{W}]_{p,d}\in R^{3\times 3}$,填充 $p=2$ ,步长 $s=2$ ,即经过卷积,输出大小为 $\frac{5+2+2-3}{2}=3$
参数数量
每个输出特征映射都需要 $c_i$ 个卷积核,共需要 $c_o\times c_i$ 个卷积核,每个卷积核大小为 $k_h\times k_w$ 。同时,每个卷积核对应一个实数偏置,所以有 $c_o\times c_i\times k_h\times k_w+c_o\times c_i$ 个参数需要存储与学习
池化层
池化层直观上的作用是减少神经元数量,可以缓解卷积层对位置的敏感性
- 减少输出层神经元数量:
- 一维卷积:$M_l=M_{l-1}-(K-1)$ ,即减少 $K-1$ 个神经元
- 二维卷积:$m_h\times m_w=(\frac{m_{w-1}+p_w+s_w-k_w}{s_w}\times \frac{m_{h-1}+p_h+s_h-k_h}{s_h})$
池化(汇聚)指对每个区域采样,用一个具有代表性的值代替这个区域
池化层也称为子采样层,作用是进行特征选择,降低特征数量,从而减少参数数量
通常处理图像时,我们希望逐渐降低隐藏在图像中的空间信息、聚集信息,随着网络层数的加深,每个神经元的感受野就越大
而机器学习的学习任务与全局图像有关,即最后一层的神经元其感受野应该是全局图像。从底层到深层,应该是从局部信息到全局信息逐渐聚合的过程,最终可以实现全局的学习目标。
在检测底层的特征时,我们通常希望在这些局部特征保持一定程度上的平移不变性。即随着拍摄角度的移动,同一个局部特征不可能发生在所有图片的同一像素位置上
池化层窗口
池化层输入 $\mathbf{X}\in \mathbb{R}^{c_i\times n_h\times n_w}$ ,对于一个通道的输入 $[\mathbf{X}]_d,d\in [1,c_i]$ ,池化层窗口 $[\mathbf{R}]_{d}\in \mathbb{R}^{r_w\times r_h},(r_h,r_w)\in [n_h,n_w]$ 可将一个通道的输入划分为多个小区域分别进行池化
这些区域可以重叠,也可以不重叠
默认情况:池化层窗口当前扫过的区域,与下一次扫过的区域没有重叠部分,即步幅和窗口大小相等 $s_w=r_w,s_h=r_h$
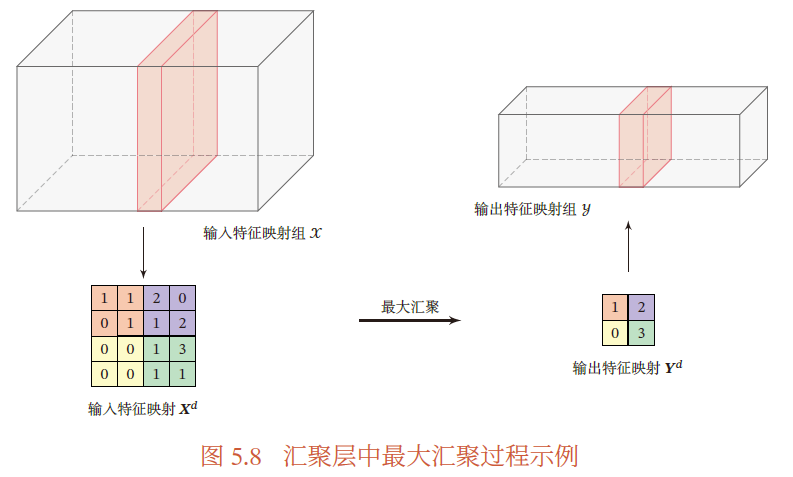
最大池化层
对于一个区域 $[\mathbf{R}]_d$ ,选择这个区域中最大的元素作为这个区域的代表
最大池化层对卷积层位置敏感的降低
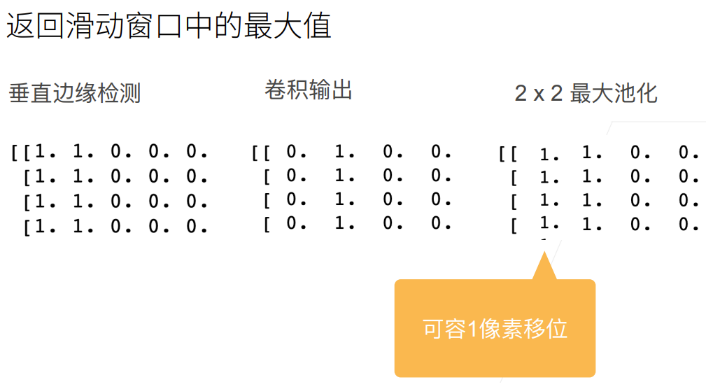
对垂直边缘的检测, $2\times 2$ 的池化层容忍1个像素的向左(右)偏移:即一些数据 $[\mathbf{X}]_{i,j}$ 是边缘,当另一数据边缘移动到 $[\mathbf{X}]_{i,j-1}$ ($[\mathbf{X}]_{i,j+1}$),池化层的 $[\mathbf{X}]_{i,j}’$ 仍会被认为是边缘
平均池化
对于一个区域 $[\mathbf{R}]_d$ ,选择这个区域的平均指标作为这个区域的代表
池化核
目前,主流的卷积网络仅包含 下采样 操作,但在一些早期卷积网络(LeNet-5),有时也会在汇聚层使用非线性激活函数
典型的池化层将每个特征映射划分为 $2\times 2$ 大小的不重叠区域,使用最大汇聚方式采样
- 过大的采样区域会造成神经元数量减少过多,从而造成较多的信息损失
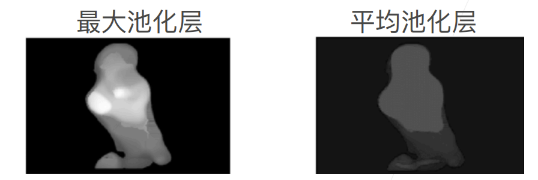
最大池化层:输出每个窗口中最强的信号,在较强信号周围的像素也会受到这个强信号的影响,会有明显的层次化信息
平均池化层:对信号有一定抹平效果,信号强度小于最大池化层,有柔和作用
实现
1 | import torch |
1 | X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]]) |
池化层超参数
池化层也能通过修改填充和步幅改变输出形状
1 | X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4)) |
默认情况下,步幅与窗口大小相等
池化层窗口大小为3,步幅也为3,所以输出窗口为 $\frac{4+3-3}{3}=1$
1 | pool2d = nn.MaxPool2d(3) |
自定义步幅与填充:输出 $\frac{4+1+2-3}{2}=2$
1 | pool2d = nn.MaxPool2d(3, padding=1, stride=2) |
也可以修改池化层窗口大小,$\frac{4-2+0+2}{2}=2$ ,$\frac{4-3+3+1}{3}=2$
1 | pool2d = nn.MaxPool2d((2, 3), stride=(2, 3), padding=(0, 1)) |
多输入通道
在处理多输入通道的数据时,池化层在每个通道上单独运算,池化层的输出通道数与输入通道数相同
1 | #构建两个通道的输入X和X+1 |
对2输入通道的数据进行池化,输出通道仍是2
1 | pool2d = nn.MaxPool2d(3, padding=1, stride=2) |
卷积神经网络的整体结构
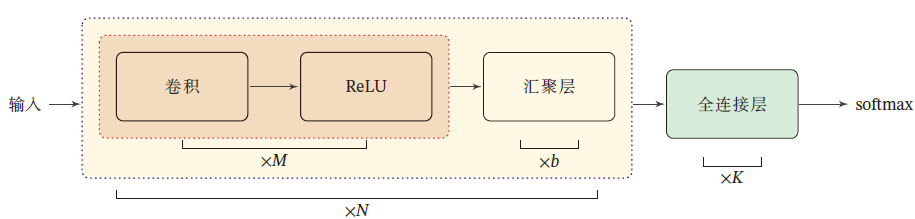
一个 卷积块 为连续 $M$ 个卷积层和 $b$ 个汇聚层组成(一般情况,$m为2\sim 5$,$b\in\{0,1\}$)
一个卷积神经网络会连续堆叠 $N$ 个卷积块,拼接为 $K$ 个全连接层,最后 softmax 归一化
典型结构:
- 小卷积,大深度
- 趋向于全卷积:由于卷积操作越来越灵活(不同的步长),池化层的作用正在变小
6.3.2 参数学习
卷积神经网络中,参数为卷积核及其偏置,只需要计算卷积层中参数的梯度
参数求解目标
第 $l$ 层卷积层的输入为 $\mathbf{X}_{l}\in\R^{c_i\times n_h\times n_w}$ ,通过卷积运算得到第 $l$ 层的净输出,即第 $l$ 卷积层
第 $l$ 层有 $c_o\times c_i$ 个卷积核和偏置,每个卷积核有 $k_h\times k_w$ 个参数,即每一层共有 $c_o\times c_i\times (k_h\times k_w+1)$ 个参数需要学习
采用交叉熵损失函数
若有 $N$ 个训练数据,则结构风险函数为
参数学习的核心是梯度的学习,即求解 $\frac{\partial \mathcal{R}\left([\mathbf{W}]_{p,d}^{(l)},[\mathbf{B}]_{p,d}^{(l)}\right)}{\partial [\mathbf{W}]_{p,d}^{(l)}}$ ,$\frac{\partial \mathcal{R}\left([\mathbf{W}]_{p,d}^{(l)},[\mathbf{B}]_{p,d}^{(l)}\right)}{\partial [\mathbf{B}]_{p,d}^{(l)}}$
卷积梯度
假设 $\mathbf{H}=\mathbf{W}* \mathbf{X}\in \mathbb{R}^{(n_h-k_h+1)\times (n_w-k_w+1)}$ ,其中 $\mathbf{X}\in \mathbb{R}^{n_h\times n_w}$ ,$\mathbf{W}\in \mathbb{R}^{k_h\times k_w}$ ,有特征映射 $f(\mathbf{H})\in \mathbb{R}$ 为标量,$f(\cdot)$ 为非线性激活函数
- 互相关结果的每个元素 $[\mathbf{H}]_{i,j}$ 与每一卷积核元素 $[\mathbf{W}]_{a,b}$ 有关所以对卷积核某一元素求偏导,是所有输出元素对该元素求偏导的核
所以 $f(\mathbf{H})$ 关于 $\mathbf{W}$ 的梯度为 $\mathbf{X}$ 与 $\frac{\partial f(\mathbf{H})}{\partial \mathbf{H}}$ 的互相关运算
当使用 $[\mathbf{X}]_{i+a-1,j+b-1}$ 这个数据时,其相应的卷积核元素为 $[\mathbf{W}]_{a,b}$ ,所以当 $\begin{cases}i+a-1=s\\j+b-1=t\end{cases}$ ,$\begin{cases}a=s-i+1\\b=t-j+1\end{cases}$
$\mathbf{W}$ 的高上限为 $k_h$ ,但 $s-i+1$ 的上限为 $n_h$ ;$\mathbf{W}$ 的高下限为 $1$ ,但 $s-i+1$ 的下限为 $1-(n_h-w_h+1)+1=1-(n_h-k_h)$ 。
所以,当 $(s-i+1)<1$ 或 $(s-i+1)>k_h$ ,$(t-j+1)<1$ 或 $t-j+1>k_w$ 时,$[\mathbf{W}]_{s-i+1,t-j+1}=0$ ,相当于对 $\mathbf{W}$ 进行了 $(2(n_h-k_h),2(n_w-k_w))$ 的零填充
即 $f(\mathbf{H})$ 关于 $\mathbf{X}$ 的梯度为 $\mathbf{W}$ 与 $\frac{\partial f(\mathbf{H})}{\partial \mathbf{H}}$ 的宽卷积
卷积层误差项反向传播
误差反向传播中,讨论的是:
根据卷积求导公式,有
即在卷积神经网络中,第 $l$ 层参数的梯度依赖于所在层的误差项 $\delta^{(l)}_p$
由于第 $l+1$ 层的输入 $\mathbf{X}^{(l+1)}$ 为第 $l$ 层的活性值 $f_l\left(\mathbf{H}^{(l)}\right)$ ,即有第 $l+1$ 层输入的第 $p$ 个元素等于第 $l$ 层净输出的第 $p$ 个元素
故:
$f_l’\left([\mathbf{H}]^{(l)}_p\right)$ 为 $c_o\times c_o$ 的对角矩阵,对角线元素为 $f_l’\left([\mathbf{H}]^{(l)}_1\right),\cdots,f_l’\left([\mathbf{H}]^{(l)}_{c_o}\right)$
已知(PS:见《全连接层#误差的反向传播算法》)
其中,$\mathbf{h}_l$ 为第 $l$ 层活性值,即对活性值的求导,每一个元素都需要第 $l+1$ 层的 $M_{l+1}$ 个元素累加 $\sum\limits_j^{M_{l+1}}$
由于 $[\mathbf{X}]^{(l+1)}_p=f_l\left([\mathbf{H}]_p^{(l)}\right)$ 为第 $l$ 层的活性值,所以有
综上,卷积层误差项为
池化层误差项反向传播
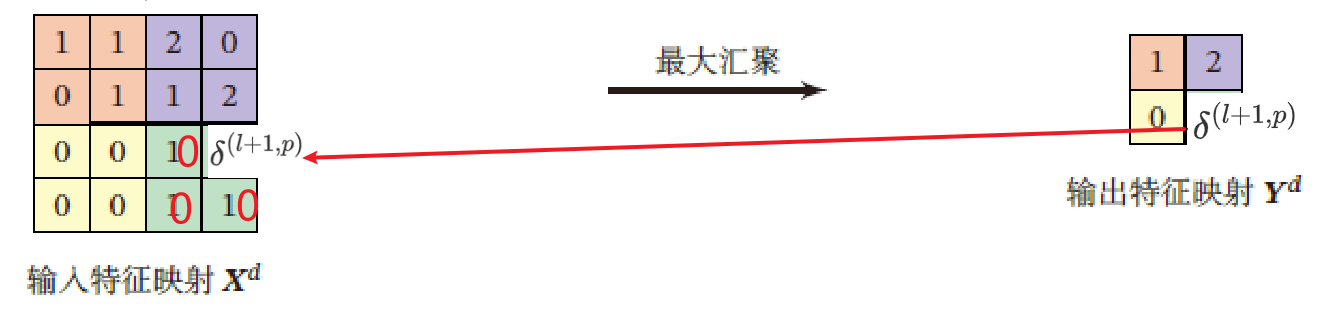
当第 $l+1$ 层是池化层时,因为池化层是下采样操作,第 $l+1$ 层的误差项 $\delta$ 对应于第 $l$ 层相应特征映射的一个区域
第 $l$ 层的第 $p$ 个特征映射中的每个神经元都有一条边和 $l+1$ 层的第 $p$ 个特征映射中的一个神经元相连
第 $l$ 层第 $p$ 个特征映射的误差项 $\delta^{(l)}_p$ 的具体推导为
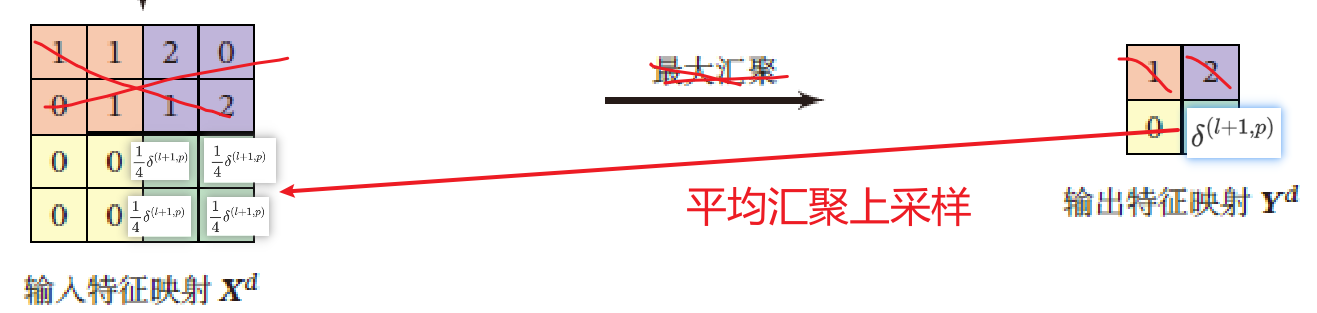
$up(\cdot)$ 为上采样函数,与汇聚层的下采样操作相反
若下采样是最大汇聚,则 $\delta^{(l+1)}_p$ 中每个值会直接传递到前一层对应区域中的最大值对应的神经元,该区域中其他神经元设为0
若下采样是平均汇聚,则误差项 $\delta^{(l+1)}_p$ 中每个值被平均分配到前一层对应区域的所有神经元上