[TOC]
- 策略梯度
- 最优梯度的度量
- 度量的梯度
- 基于蒙特卡洛的策略梯度——REINFORCE
- 梯度上升算法
- AC方法
- QAC
- A2C:通过引入偏置量减少估计的方差
- off-policy AC:将on-policy方法转换为 off-policy方法
- 重要性采样
- DPG:随机策略变为确定性策略
5.1 策略梯度
之前的方法以策略为核心,基于价值产生策略,并用表格表示策略
策略梯度 (policy gradient) 是基于策略的方法,用策略函数近似策略
利用机器学习模型的泛化能力,将已知状态上的策略泛化到未知状态上的策略
目标函数是策略的函数,通过优化目标函数直接获取最优策略
- A-C方法,实际上是将策略梯度与价值函数结合的方法
5.1.1 策略的表示
表格型策略
策略为在每个状态下 $s\in \mathcal{S}$ 采取每个动作 $a\in \mathcal{A}(s)$ 的可能性可以用表格 $\pi(a\vert s)$ 表示,在表格中使用 $(s,a)$ 获取每个策略
| $a_1$ | $a_2$ | $a_3$ | $a_4$ | $a_5$ | |
|---|---|---|---|---|---|
| $s_1$ | $\pi(a_1\vert s_1)$ | $\pi(a_2\vert s_1)$ | $\pi(a_3\vert s_1)$ | $\pi(a_4\vert s_1)$ | $\pi(a_5\vert s_1)$ |
| $\vdots$ | $\vdots$ | $\vdots$ | $\vdots$ | $\vdots$ | $\vdots$ |
| $s_9$ | $\pi(a_1\vert s_9)$ | $\pi(a_2\vert s_1)$ | $\pi(a_3\vert s_1)$ | $\pi(a_4\vert s_1)$ | $\pi(a_5\vert s_1)$ |
缺点:当状态空间很大或无穷、状态连续变化时,用表格表示策略就非常低效,体现在存储与泛化能力的缺陷上
函数型策略
用带参数的函数拟合策略,也可以表示为 $\pi_{\theta}(a\vert s),\pi(a,s,\theta),\pi_{\theta}(a,s)$
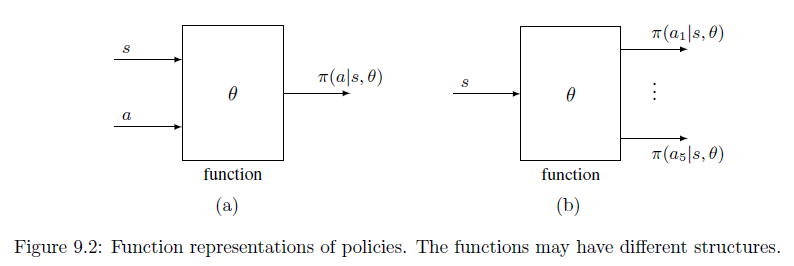
(a) 输入是状态和动作,输出是当前状态下采取这个动作使累积奖励最大化的可能性
(b) 输入是状态,输出是当前状态下采取各个动作使累积奖励最大化的可能性
最优的策略可以通过最优化度量标量的目标函数获取,这种方法称为 策略梯度
- 更适合处理高维度或连续的动作空间
- 具有更强大的泛化能力
- 具有更好的收敛性质和稳定性
- 能够学习随机策略
缺点:
- 通常会收敛到局部最优,而非全局最优,所以需要加噪音扰动
- 评价一个策略通常不高效,且方差较大(受数据分布影响大,策略一直变,所以数据分布一直变)
表格型VS函数型
最优策略的定义:
- 表格型:若一个策略 $\pi^$ 使每个状态价值都是最大的,即 $\mathbf{V}_{\pi^}(S)\ge\mathbf{V}_{\pi}(S),\forall \pi\in \Pi$
- 函数型:指定一个标量的策略度量指标目标函数,使目标函数最大化的策略就是最优策略
获取一个动作的概率:
表格型:通过 $(s,a)$ 可查表获取
函数型:计算策略函数的值 $\pi(a\vert s,\theta)$
参数每传播一次,都需要计算一次
策略更新:
- 表格型:直接修改 $\pi(a\vert s)$ 的值
- 函数型:通过修改策略函数的参数 $\theta$ 间接影响策略
策略梯度基本思路
所有的策略度量指标 $J(\pi)$ 都是 $\pi$ 的函数,而 $\pi(a\vert s,\theta)$ 是关于参数 $\theta$ 的函数 ,不同的参数值 $\theta$ 会影响策略优劣的度量值,因此,通过最优化 $\theta$ 的值来最大化这些度量指标,可以找到最优的策略
最优化算法为梯度上升法
- 如何定义策略度量指标
- 如何计算策略度量指标的梯度
5.1.2 策略度量指标
平均状态价值
- $\overline{V}_{\pi}$ 为在策略 $\pi$ 下加权平均的状态价值
- $d(s)\ge 0,\sum\limits_{s\in \mathcal{S}}d(s)=1$ 是状态 $s$ 的权重,也可以理解为状态的概率分布 $S\sim d$
- 向量形式下,$\mathbf{d}=\begin{bmatrix}\vdots\\d(s)\\\vdots\end{bmatrix}\in \R^{\vert \mathcal{S}\vert},\mathbf{V}_{\pi}=\begin{bmatrix}\vdots\\V_{\pi}(s)\\\vdots\end{bmatrix}\in\R^{\vert \mathcal{S}\vert}$
若求解加权平均,需要知道状态 $S$ 服从的分布 $d$
$d$ 与策略 $\pi$ 无关
将分布 $d$ 记为 $d_0$ ,此时,平均状态价值记为 $\overline{V}_{\pi}^0$
相对简单,因为度量指标函数的梯度计算相对简单
一种情况是每个状态都是同等重要的,因此将 $d_0$ 视为均匀分布,$d_0(s)=\frac{1}{\vert \mathcal{S}\vert}$
另一种情况是只关注特定的状态 $s_0$ , 如在一些任务中所有回合都从相同的起始状态 $s_0$ 出发,实际上就是最大化从 $s_0$ 出发得到的回报,因此 $d_0(s_0)=1,d_0(s\neq s_0)=0\Rightarrow\overline{V}_{\pi}=V_{\pi}(s_0)$
$d$ 与策略 $\pi$ 有关
状态的分布与策略 $\pi$ 有关,即 $d$ 是策略 $\pi$ 下的稳态分布
- 状态分布概率值是状态转移矩阵特征值为1的特征向量
平均单步立即奖励
其中,$r_{\pi}(s)=\sum\limits_{a\in \mathcal{A}(s)}\pi(a\vert s,\theta)r(s,a)$ ,$r(s,a)=E[R\vert s,a]=\sum\limits_{r’}r’P(r’\vert s,a)$
两种度量指标的关系
关于策略的度量指标,可以定义在折扣奖励 $\gamma \in [0,1)$ 下,也可以定义在非折扣奖励 $\gamma=1$ 下
对于 平均单步立即奖励 $\overline{r}_{\pi}$ ,只是对立即奖励的平均,不求回报所以也不需要考虑折扣因子,此时 $\gamma=1$
$\overline{r}_{\pi}$ 是一种非常短视的度量指标,只考虑立即奖励,相反,$\overline{V}_{\pi}$ 是一种相对远视的度量指标,考虑到所有步的总奖励,虽然二者不相等,但成正比
一个达到最优,另一个也能达到极值
证明:贝尔曼方程 $V_{\pi}=r_{\pi}+\gamma P_{\pi}V_{\pi}$ ,两边同乘 $d^T_{\pi}$
等价定义
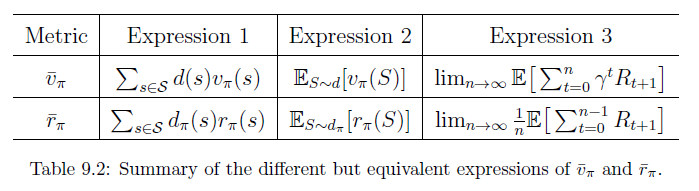
平均状态价值
在策略 $\pi$ 下有从状态 $S_0$ 开始的轨迹 $(A_{0},R_{1},S_1,A_1,R_2,\cdots)$ ,满足 $A_{t}=\pi(S_t,\theta)$ ,$R_{t+1},S_{t+1}\sim P(R_{t+1},S_{t+1}\vert S_t,A_t)$
对于
平均单步立即奖励
假设在策略 $\pi$ 下生成了起始状态为 $s_0$ 的轨迹,奖励序列为 $\{R_{t+1}\}_{t=0}^\infty$,这个轨迹的平均单步奖励为
- 起始状态 $s_0$ 是什么不重要
证明:
首先,证明对于任意的起始状态 $s_0$ ,有第一个等号成立
- 纬洛平均:对于一个序列 $\{a_k\}_{k=1}^{\infty}$ 若其是收敛的,即 $\lim\limits_{k\rightarrow \infty}a_k$ 是存在的,则 $\lim\limits_{n\rightarrow \infty}\frac{1}{n}\sum\limits_{k=1}^{\infty}a_k=\lim\limits_{k\rightarrow \infty}a_k$ ,故序列 $\left\{\frac{1}{n}\sum\limits_{k=1}^{n}a_k\right\}_{n=1}^{\infty}$ 是一个收敛序列
其次,证明等价
对于 $E\left[R_{t+1}\vert S_0=s_0\right]$ ,其全期望公式
- $P^{(t)}(s\vert s_0)$ 表示在第 $t$ 轮迭代中使用的状态转移矩阵因此,起始状态 $s_0$ 并不重要
故有等价成立
最后,对于任意的稳态分布 $d$ ,是否仍然成立
即,对任意的稳态分布 $r(s)$ 都有上述等价形式
5.1.3 策略度量指标的梯度
所有度量指标的梯度有一个统一形式
$J(\theta)$ 是不同的策略度量指标 $\overline{V}_{\pi},\overline{r}_{\pi},\overline{V}_{\pi}^0$
$=$ 可以是等于、近似、成比例
$\eta$ 是状态的分布或状态的权重,在不同问题中呈现不同的分布
一些特殊的结果
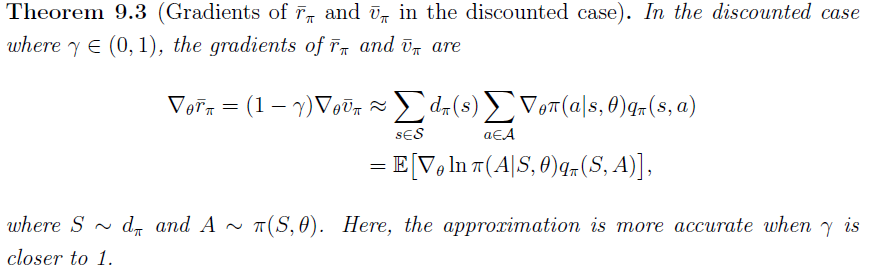
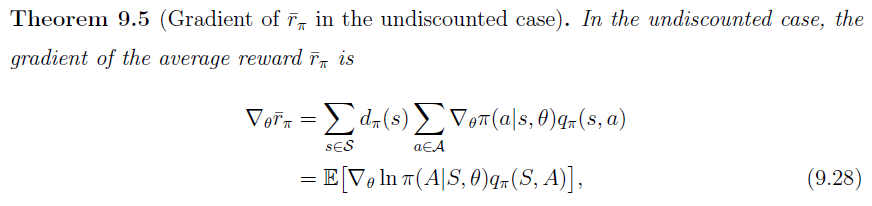
- 当折扣情况, $\simeq$ 为 $\approx$ ;当非折扣情况,$\simeq$ 为 $=$
由于 平均单步立即奖励 与 平均状态价值成正比,所以
策略梯度的计算
为了便于计算,需要将梯度改写
将其代入策略度量指标的梯度
此时,目标函数可以用样本近似
注
因为需要计算 $\ln\pi(a\vert s,\theta)$ ,必须保证 $\pi(a\vert s,\theta)>0,\forall a,s,\theta$
在RL中,若不做处理,这个条件并不满足,如贪心策略或确定性策略,有些动作 $\pi(a)=0$
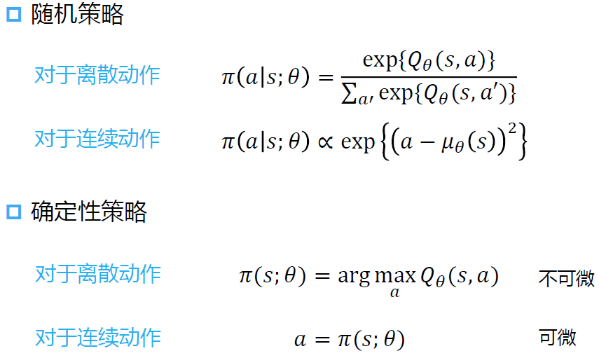
为确保满足条件,需要对所有的 $\pi(a\vert s,\theta)$ 通过 Softmax 函数归一化,将其取值变为 $(0,1)$
Softmax :对于一个特征向量 $X=\begin{bmatrix}x_1\\\vdots\\x_n\end{bmatrix}$ ,$z_i=\frac{e^{x_i}}{\sum\limits_{j=1}^ne^{x_j}}\in (0,1),\sum\limits_{i=1}^nz_i=1$
决策值可以归一化为
其中,$\pi(a\vert s,\theta)$ 的值由函数 $h(s,a,\theta)$ 确定,即 $h(\cdot)$ 为参数为 $\theta$ 的策略函数,输入状态会给出该状态下执行某个动作的概率
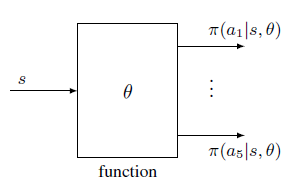
策略函数 $h(\cdot)$ 可以用神经网络实现,输入为 $s$ ,参数为 $\theta$,输出由 $\vert \mathcal{A}(s)\vert$ 个,每个输出对应采取每个动作的概率 $\pi(a\vert s,\theta)$ 且 $\sum\limits_{a\in \mathcal{A}(s)}\pi(a\vert s,\theta)=1$,此时这个神经网络的输出层为 Softmax
- 由于 $\pi(a\vert s,\theta)>0,\forall a$ ,所以策略是随机性及探索性的
- 策略梯度也可改为确定性策略
softmax策略的梯度
因此,策略网络的梯度为
5.1.4 与基于价值的学习对比
基于价值的学习由一个 $w$ 为参数的价值函数 $Q(s,a,w)$
优化目标为最小化TD误差:
更新方式
基于策略梯度的学习 由一个 $\theta$ 为参数的策略函数 $\pi(a\vert s,\theta)$
优化目标为最大化策略度量指标
更新方式
5.2 基于蒙特卡洛的策略梯度——REINFORCE
不管采用哪种策略度量指标,对策略函数的优化方法通过梯度上升法最大化 $J(\theta)$
此外,真实的动作价值 $Q_{\pi}(s_t,a_t)$ 也是未知的,需要近似
基于MC方法去近似动作价值,称为 REINFORCE 算法
用累积奖励值的无偏采样 $Q_{t}(s_t,a_t)=G_t$ 去近似 $Q_{\pi}(s_t,a_t)$
基于TD方法去近似,称为AC算法
5.2.3 伪代码
采样
从 $(s_t,a_t)$ 出发,采集一个回合
采集状态样本: $S\sim d$ ,其中分布 $d$ 状态为在策略 $\pi$ 下的稳态分布
采集动作样本:$A\sim \pi(A\vert S,\theta)$ ,$a_t$ 是策略 $\pi(a\vert s_t,\theta_{t})$ 的采样
由采样也可看出,REINFORCE 算法为同策略 on-policy 算法
REINFORCE是离线方法
基于蒙特卡洛方法,必须将所有的回合数据采集完后才能开始运行,所以策略 $\theta_{t+1}$ 更新后,并没有立即产生数据,即REINFORCE算法是一种离线算法
缺点:
基于片段式数据的任务,任务需要终止状态,才能去计算回报
低数据利用效率:需要大量的训练数据
高训练方差
从单个或多个片段中采样到的回报去估计动作价值有很高的方差
5.2.2 算法分析
由于 $\bigtriangledown_\theta\ln\pi(a_t\vert s_t,\theta_{t})=\frac{\bigtriangledown_\theta\pi(a_t\vert s_t,\theta_{t})}{\pi(a_t\vert s_t,\theta_{t})}$
其中,$\alpha\beta_t$ 作为梯度上升法的步长,必须足够小
- 若 $\beta_t>0$ ,则在 $s_t$ 时选择 $a_t$ 的可能性被提高,即 $\pi(a_t\vert s_t,\theta_{t+1})>\pi(a_t\vert s_t,\theta_{t})$ ,且 $\beta_t$ 越大,增大程度越大
- 若 $\beta_t<0$ ,则 $\pi(a_t\vert s_t,\theta_{t+1})<\pi(a_t\vert s_t,\theta_{t})$
对于任意的$\theta_{t}$ 与 $\theta_{t+1}$ ,当 $\theta_{t+1}-\theta_{t}$ 足够小时,
从微分角度看,随着 $\theta_{t+1}-\theta_{t}\rightarrow 0$ ,这个近似变为等式
其中,梯度上升法步长 $\alpha>0$ ,由此可见,当 $\beta_t>0$ 时,$\pi(a_t\vert s_t,\theta_{t+1})>\pi(a_t\vert s_t,\theta_{t})$ ;当 $\beta_t<0$ ,$\pi(a_t\vert s_t,\theta_{t+1})<pi(a_t\vert s_t,\theta_{t})$
$\beta_t=\frac{Q_{\pi}(s_t,a_t)}{\pi(a_t\vert s_t,\theta_{t})}$ 能很好平衡探索与利用
利用 :若某个动作价值大, $Q_{\pi}(s_t,a_t)$ 越大,则策略更新后,在 $s_t$ 下选择 $a_t$ 的可能性越大
$\beta_t\propto Q_{\pi}(s_t,a_t)$ ,若 $Q_{\pi}(s_t,a_t)$ 增大,则 $\beta_t$ 会增大,引起 $\pi(a_{t}\vert s_t,\theta_{t+1})$ 增大
探索 :若在状态 $s_t$ 下,选择动作 $a_t$ 的可能性很小,则策略更新后,会增大选择 $a_t$ 的可能性
$\pi(a_t\vert s_t,\theta_{t})$ 越小,则 $\beta_t$ 越大,从而 $\pi(a_{t}\vert s_t,\theta_{t+1})$ 会增大
5.3 AC方法
将价值近似函数引入到策略梯度中,得到了 Actor-Critic 方法
Actor:策略更新,策略会被应用于决策/动作选择
- 生成使评论家满意的策略
Critic:策略评估/价值评估,用度量指标衡量策略的优劣
- 学会准确估计演员策略所采取动作的价值函数
- QAC
- A2C:通过引入偏置量减少估计的方差
- off-policy AC:将on-policy方法转换为 off-policy 方法
- 重要性采样
- DPG:随机策略变为确定性策略
策略梯度方法的步骤:
用于度量策略好坏的策略度量指标函数/目标函数 $J(\theta)$ ,如:$\overline{V}_{\pi},\overline{r}_{\pi}$
Critic(策略评估):最小化价值函数与价值的损失
Actor(策略更新)
通过梯度上升法最大化 $J(\theta)$
为便于计算,使用随机梯度上升法
策略梯度的方法为 Actor ,其中 $Q_t(s_t,a_t)$ 作为价值评估/策略评估,对应 Critic
对于 $\hat{Q}_{w}(s,a)$ 的获取,若使用TD方法,这类算法统称为 AC 方法
5.3.1 QAC
- 实质上,是 基于价值近似函数的Sarsa+策略梯度
QAC是同策略 on-policy 算法
在求最优化时,由于存在一个期望 $\bigtriangledown_\theta J(\theta_{t})=E_{S\sim \eta,A\sim\pi(A\vert S,\theta)}\left[\bigtriangledown_\theta\ln\pi(A\vert S,\theta)Q_{\pi}(S,A)\right]$ ,故将算法修改为随机梯度上升法
动作需要按照策略 $\pi^{(t)}$ 的分布采样,所以 $\pi^{(t)}$ 是探索策略,同时又是不断改进的策略,所以是目标策略,因此 QAC 是同策略算法
QAC是随机性策略
采取每个动作 $a_t\in \mathcal{A}(s_t)$ 的概率 $\pi(a_t\vert s_t,\theta_{t})>0$
所以,策略本身就具有一定的探索能力 $\pi(a\vert s,\theta)$ ,不需要 $\varepsilon-贪心$ 去探索
5.3.2 A2C
advantage actor-critic(A2C):核心思想是通过引入一个偏置量 bias 减小方差,即
策略梯度对于额外的偏置量是不变的
额外的偏置量是关于状态变量 $S$ 的偏置量
为什么引入偏置量不改变策略梯度
相当于证明 $E_{S\sim \eta,A\sim\pi(A\vert S,\theta)}\left[\bigtriangledown_\theta\ln\pi(A\vert S,\theta)b(S)\right]=0$
为什么引入偏置量能减小估计方差
令 $\bigtriangledown_\theta J(\theta)=E[X]$ ,其中 $X(S,A)=\bigtriangledown_\theta\ln\pi(A\vert S,\theta)\cdot \left(Q_{\pi}(S,A)-b(S)\right)$
$X$ 的期望 $E[X]$ 与 $b(S)$ 无关,方差 $var(X)$ 与 $b(S)$ 有关
使用方差的迹评价方差大小,$tr[var(X)]=E[X^TX]-\overline{X}^T\overline{X}$
已知 $\overline{X}^T\overline{X}=\left(E[X]\right)^TE[X]$ 与偏置量 $b(S)$ 无关
可见偏置量 $b(S)$ 对策略度量函数梯度的方差有影响,
为使 $var(X)$ 最小化,最优的偏差应使 $\bigtriangledown_bE[X^TX]=0$ ,即
且 $b(S)=0$ 不是好的偏置
- 对于 REINFORCE 与 QAC 算法,其偏置量 $b(S)=0$ ,并不是好的偏置
减小方差的意义:采样时会有更小的误差,在均值相同的情况下,采样时方差小的样本集,每个样本 $X$ 都接近平均值。即使用RM算法近似策略梯度时,随机采集到的每个样本都能接近期望,使策略梯度受随机采样的影响程度最小,进而使得最优化的结果受采样的影响程度最小
因此,在A2C中,算法目标为对 $\theta$ 最优化,使得 $J(\theta)$ 最大,同时,选择一个最优的偏置 $b(S)$ 最小化策略梯度方差 $var(X),X=\bigtriangledown_\theta\ln\pi(A\vert S,\theta)\cdot \left(Q_{\pi}(S,A)-b(S)\right)$
尽管存在最优的偏置量,但为了计算方便,移除权重 $\Vert\bigtriangledown_\theta \ln \pi(A\vert s,\theta_{t})\Vert^2$ ,仅使用次优偏置量
算法
令偏置量 $b(s)=V_{\pi}(s)$
$\delta_\pi(S,A)$ 称为优势函数,因为 $V_{\pi}(s)=\sum\limits_{a\in \mathcal{A}(s)}\pi(a\vert s,\theta_{t})Q_{\pi}(s,a)$ ,即状态价值为动作价值的加权平均,若某个动作价值比均值大,说明这个动作是比较好的,其 $Q(s,a)$ 比均值大,$\delta_{\pi}(s,a)>0$ ,这个动作具有一定优势
- 使用 $\delta$ 代替动作价值 $Q$ ,因为我们在乎的不是动作价值的绝对大小,而是动作价值间的相对大小
将梯度上升法改为随机梯度上升法
另外,由动作价值定义:
优势函数可以用TD误差来近似:
因此,我们仅需要一个神经网络来近似 $V_{\pi}(S)$ 而不再需要动作价值网络 $Q_{\pi}(S,A)$
伪代码
A2C是同策略算法
在一步迭代后,$\theta_{t}$ 会更新为 $\theta_{t+1}$ ,同时,会基于更新后的策略 $\pi(a\vert s_t,\theta_{t})$ 生成下一步经验,因此策略 $\pi$ 既是目标策略又是探索策略
A2C是随机性策略
由于策略梯度算法需要经过 Softmax 层,所以每个动作的概率 $\pi(a\vert s)>0$ ,即随机性策略
$\mbox{step size}=\frac{\delta_t(s_t,a_t)}{\pi(a_t\vert s_t,\theta_{t})}$ 能很好平衡探索与利用
由于 $\bigtriangledown_\theta\ln\pi(a_t\vert s_t,\theta_{t})=\frac{\bigtriangledown_\theta\pi(a_t\vert s_t,\theta_{t})}{\pi(a_t\vert s_t,\theta_{t})}$
利用
step size 比较大,也就是优势函数 $\hat{\delta}_{t}(s_t,a_t)$ 比较大,即 $a_t$ 的动作价值 $Q_{\pi_{\theta_{t}}}(s_t,a_t)$ 明显大于 $s_t$ 下的平均动作价值 $V_{\pi}(s)$ ,则策略更新后,在 $s_t$ 下选择 $a_t$ 的可能性越大
$\mbox{step size}\propto \hat{\delta}_{t}(s_t,a_t)$ ,若 $\hat{\delta}_{t}(s_t,a_t)$ 增大,则 $\mbox{step size}$ 会增大,策略更新时会朝着 $\pi(a_{t}\vert s_t,\theta_{t+1})$ 增大的方向更新
探索 :若在状态 $s_t$ 下,选择动作 $a_t$ 的可能性很小,则策略更新后,会增大选择 $a_t$ 的可能性
$\pi(a_t\vert s_t,\theta_{t})$ 越小,则 $\mbox{step size}$ 越大,从而 $\pi(a_{t}\vert s_t,\theta_{t+1})$ 会增大
5.3.3 异策略AC算法
REINFORCE ,QAC ,A2C 都是同策略算法,因为在计算策略度量指标梯度时,涉及到期望的计算
基于RM算法,改为随机梯度下降法,由于在采样过程中,由于动作 $A\sim \pi(A\vert S,\theta_{t})$ 策略 $\pi$ 作为探索策略同时也是目标策略,所以他们都是同策略算法
为复用通过其他方法得到的一些经验,通过 重要性采样 技巧,可将其改为异策略AC算法
- 同理,重要性采样可用于任何估计期望的算法中
对于异策略算法,我们希望估计 $E_{A\sim \pi}[*],(A\sim p_0)$ ,其中 $\pi$ 是目标策略,而样本基于探索策略 $\mu,(\{a_i\}\sim p_1)$
异策略策略梯度
- 策略梯度表达式
- 使用梯度上升的方法优化
异策略梯度表达式
设 $\mu$ 为探索策略用于生成经验样本,目标是使用这些经验样本去更新目标策略 $\pi$ ,使得策略度量指标 $J(\theta)$ 最小化
其中,$d_{\mu}$ 是状态 $S$ 在策略 $\mu$ 下的稳态分布
异策略梯度
在折扣奖励情况下 $\gamma\in (0,1)$ ,目标函数 $J(\theta)$ 的梯度为
- $\mu$ 为探索策略,$\eta$ 为状态服从的分布$Pr_{\pi}(s\vert s’)=\sum\limits_{k=0}^{\infty}\gamma^k\left[P_{\pi}^k\right]_{s’s}=[(I-\gamma P_{\pi})^{-1}]_{s’s}$ ,表示基于策略 $\pi$ 从状态 $s’$ 转移到 $s$ 的概率,其中 $[\cdot]_{s’s}$ 表示矩阵第 $s’$ 行,第 $s$ 列的值
异策略梯度优化
异策略梯度仍引入偏置量 $b(S)$ ,有
为减少估计方差,令偏置量 $b(S)=V_{\pi}(S)$
相应的随机梯度上升算法为
为了便于计算,将优势函数 $\delta_t(s_t,a_t)$ 用TD误差去近似
因此,异策略梯度优化为
充分利用的算法
在异策略梯度中
此时,$\mu(a\vert s_t)$ 可看做是固定值,若 $\hat{\delta}_t(s_t,a_t)$ 越大,则表明动作 $a_t$ 的优势越大,策略更新时要朝着 $a_t$ 增大的方向迭代,即充分利用
伪代码
5.3.4 Deterministic actor-critic(DPG)
策略梯度算法,为便于求解,将策略度量函数的梯度转换为期望形式,使用RM算法去近似估计。而这个转换设计 $\ln \pi$ ,因此,$\pi(a\vert s,\theta)>0,\forall a$ ,即每个动作的概率都不为0,也不会有动作的概率为1,所以 REINFORCE、QAC,A2C,异策略A2C 都是随机性策略
随机性策略的缺点是动作 $a_t$ 的个数必须有限,不能处理连续动作
若改用确定性策略,可以处理连续的动作,表示为 $a=\pi(s,\theta)$ ,相当于采取某个动作的概率为1,其余动作概率为0
- $\pi$ 为从状态空间 $\mathcal{S}$ 到动作空间 $\mathcal{A}$ 的映射 $\pi:\mathcal{S}\mapsto \mathcal{A}$
- $\pi$ 也可以是一个神经网络,其输入是状态 $s$ ,输出是一个动作 $a$ ,其参数为 $\theta$
梯度的计算
之前的梯度仅是针对随机策略的梯度,若策略是确定性的,需要重新计算梯度
确定性策略梯度的统一形式
- $\eta$ 为状态 $s$ 的分布,具体表达式由探索策略下状态的稳态分布与基于策略 $\pi$ 的状态转移确定
- 对于策略 $\pi$ 下的动作价值 $Q_{\pi}(s,a)$ ,先对 $a$ 求梯度,然后将所有的动作替换为 $\pi(s)$ ——二者是等价的
DPG天然是异策略
首先,actor 是异策略的
求策略度量梯度时并不涉及动作的分布,因为这个动作 $a$ 会被替换为 $\pi(s)$ ,所以不需要 $A$ 对应的分布
之后使用随机梯度上升法相当于对真实的梯度进行随机采样,若在采样时,给定了一个 $s_t$ ,根据这个状态 $s_t$ 可以得到 $a_t$ ,并不需要关心这个 $a_t$ 是哪个策略得到的,因此可以使用任何的探索策略,即DPG天然是异策略的
其次,critic 也是异策略的
对价值函数的近似需要的经验样本是 $(s_t,a_t,r_{t+1},s_{t+1},\tilde{a}_{t+1})$ ,$\tilde{a}_{t+1}=\pi(s_{t+1})$ ,这个经验样本的生成涉及两个策略
第一个策略是对状态 $s_t$ 时生成 $a_t$ ,这个策略是探索策略,$a_{t}$ 用于与环境交互
第二个策略是对状态 $s_{t+1}$ 生成 $\tilde{a}_{t+1}$ ,这个策略必须是 $\pi$ ,因为这是 critic 要去评价的策略 ,所以 $\pi$ 是目标策略,$\tilde{a}_{t+1}$ 在下一时刻并不会用于与环境实际交互
两种常用的度量指标梯度
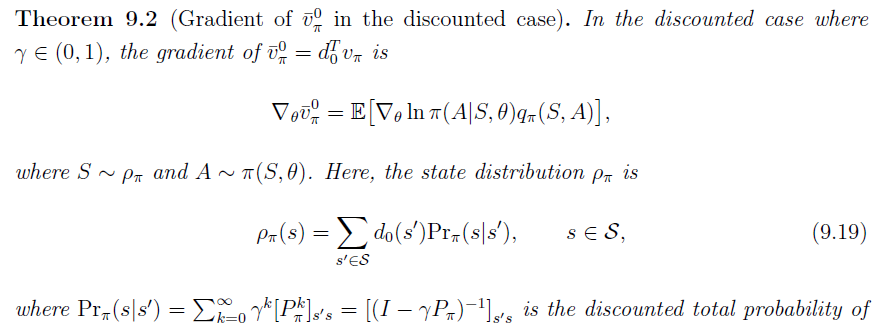
平均状态价值
将平均状态价值的折扣情况作为策略度量指标
其中,$\sum\limits_{s\in \mathcal{S}}d_0(s)=1$ ,为了便于计算,状态服从与策略 $\pi$ 独立的稳态分布
关于状态分布的选择:
$d_0(s_0)=1$ 且 $d_0(s\neq s_0)=0$ ,其中状态 $s_0$ 是我们关注的起始状态
策略优化的目标是最大化从 $s_0$ 开始的折扣奖励
$d_0$ 是另一个不同于 $\pi$ 的探索策略 $\mu$ 下的稳态分布
与异策略有关,因为DPG算法天然是异策略的,不需要重要性采样进行转换
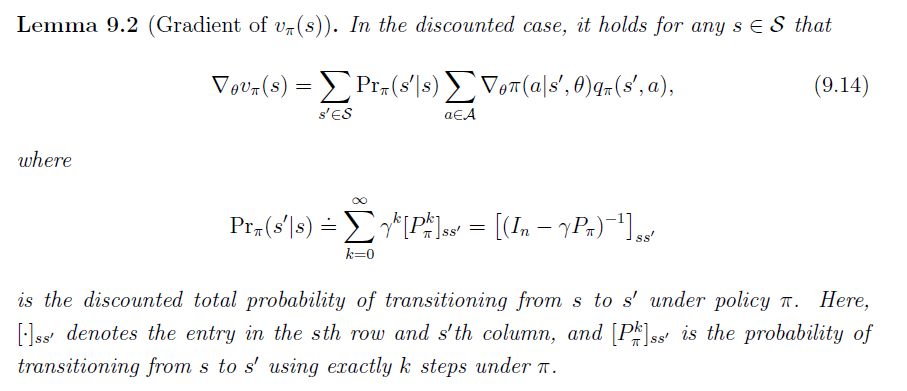
为计算目标函数的梯度,首先要计算 $\gamma\in (0,1)$ 时 $V_{\pi}(s),\forall s\in \mathcal{S}$ 的梯度
- 其中,$Pr_{\pi}(s’\vert s)=\sum\limits_{k=0}^{\infty}\gamma^k\left[P^{k}_{\pi}\right]_{ss’}=\left[(I-\gamma P_{\pi})^{-1}\right]_{ss’}$ ,表示基于策略 $\pi$ 从状态 $s$ 转移到 $s’$ 的概率,其中 $[\cdot]_{ss’}$ 表示矩阵第 $s$ 行,第 $s’$ 列的值
策略度量指标的梯度 $\bigtriangledown_\theta J(\theta)$ 为
其中,$\eta_{\pi}(s)=\sum\limits_{s’\in \mathcal{S}}d_0(s’)Pr_{\pi}(s\vert s’)$
- 其中,$Pr_{\pi}(s\vert s’)=\sum\limits_{k=0}^{\infty}\gamma^k\left[P^{k}_{\pi}\right]_{s’s}=\left[(I-\gamma P_{\pi})^{-1}\right]_{s’s}$ ,表示基于策略 $\pi$ 从状态 $s’$ 转移到 $s$ 的概率,其中 $[\cdot]_{s’s}$ 表示矩阵第 $s’$ 行,第 $s$ 列的值
平均单步立即奖励
将平均单步立即奖励作为策略度量指标
其中,$r_{\pi}(s)=E[R\vert s,a=\pi(s,\theta)]=\sum\limits_{r}rP(r\vert s,a=\pi(s,\theta))$
策略梯度为
- 其中,$d_{\pi}$ 为状态 $S$ 基于策略 $\pi$ 的稳态分布
DPG算法
基于策略梯度,使用梯度上升法最大化策略度量函数
相应的使用随机梯度上升法去近似
伪代码
对于探索策略 $\mu$ ,也可以将其变为 $\pi+噪音$
每次得到一个 $\pi(s)$ 后,因为 $\pi$ 本身是确定性是,不能探索,所以加上一些噪音,可以有一定的随机性,下一个动作的生成就与目标策略 $\pi$ 有了关系
- 实质上,$\pi+噪音$ 与 $\varepsilon-贪心$ 非常类似,但这里不能用贪心算法,因为此处应对的时动作空间连续的情况,不能给无限的连续动作赋予一定探索概率
此时,DPG可以变为同策略算法
DPG的进一步改进
使用不同的价值近似基函数去近似 $\hat{Q}(s,a,w)$ 会得到不同的DPG改进算法
线性函数:$\hat{Q}(s_t,a_t,w_{t})=\phi^T(s,a)\cdot w$
线性近似基函数的难点在于基函数(特征向量)的选择,由于函数结构的限制,逼近动作价值的能力有限
神经网络 :DDPG