[TOC]
参数化的价值函数 $\hat{V}(s,\phi),\hat{Q}(s,\phi)$ 和策略函数 $\pi_{\theta}(a\vert s)$,使得环境的连续状态和连续决策得以表示,是强化学习落地的第一步
价值函数通过最小化价值函数与TD目标之间的平方损失学习
策略函数通过最大化策略度量指标的期望得以学习
深度学习与强化学习的结合
传统计算机视觉与深度计算机视觉
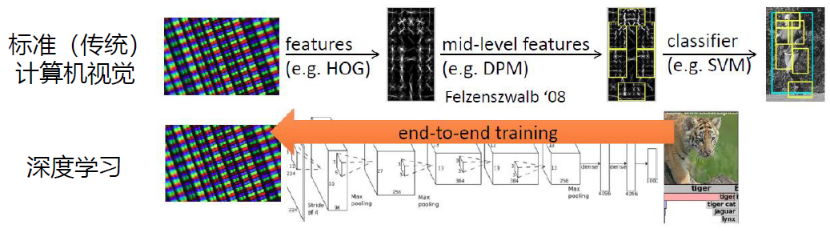
- 给定一张图片,先要提取它的特征,使用一些设计好的特征,如:方向梯度直方图(histogram of oriented gradient, HOG)、可变形的组件模型(deformable part model, DPM)
- 提取这些特征,再单独训练一个分类器,这个分类器可以是支持向量机或Boosting,就可以对图像进行分类
2012年,AlexNet将特征提取与分类过程合并。通过训练一个神经网络实现端到端的训练,这个神经网络既可以做特征提取,又可以做分类。
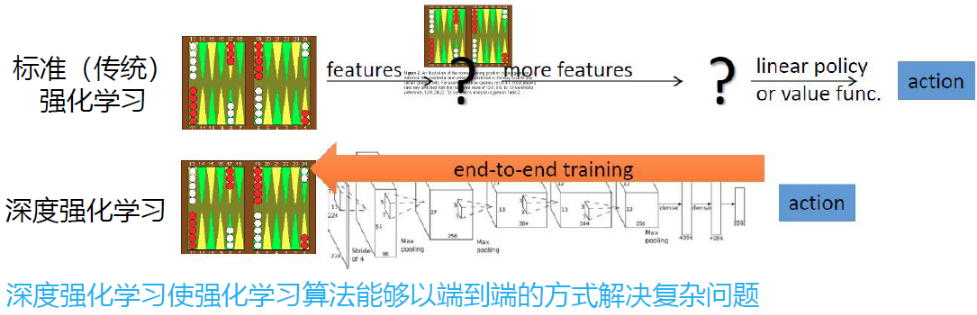
传统强化学习与深度强化学习
标准强化学习
- 设计很多特征,这些特征可以描述环境当前的整个状态
- 得到特征后,通过训练一个分类网络或分别训练一个价值估计函数来采取动作
- 价值函数和策略函数的基函数选择也是特征抽取的一部分
深度强化学习
智能体引入神经网络,可以用神经网络拟合价值函数或策略网络,省去特征工程的过程,训练的过程变为一个端到端的训练。
采用策略网络每个动作进行采样,则其输入为环境当前状态,输出为所有动作的可能性,直到当前动作序列结束,依次对每个动作进行惩罚。
近年来深度强化学习被广泛应用
我们有了更多的算力资源,有了更多的GPU,可以更快地做更多的试错尝试。通过不同的尝试,智能体在环境中获得了很多信息,可以在环境中取得很大的奖励
有了深度强化学习这种端到端的训练方式,可以把特征提取、价值估计以及决策部分一起优化,得到一个更强的决策网络
深度强化学习的关键变化
- 相当高维的参数空间,容易过拟合
- 难以稳定地训练
- 需要大量的数据
- 需要高性能计算
- CPU(收集数据)和GPU(训练神经网络)间的平衡
两方面研究
- 在深度学习模型基础上,强化学习如何更加有效的工作,并避免深度学习模型带来的一系列问题,如:Q值估计过高问题
- 在强化学习场景下,深度学习如何有效地学习到有用的模式,如设计Dueling DQN的价值网络与动作优势网络
DRL分类
基于价值的方法:DQN及其扩展
基于策略的方法:使用神经网络的策略梯度,如:自然策略梯度,信任区域策略优化(TPRO),近端策略优化(PPO),A3C
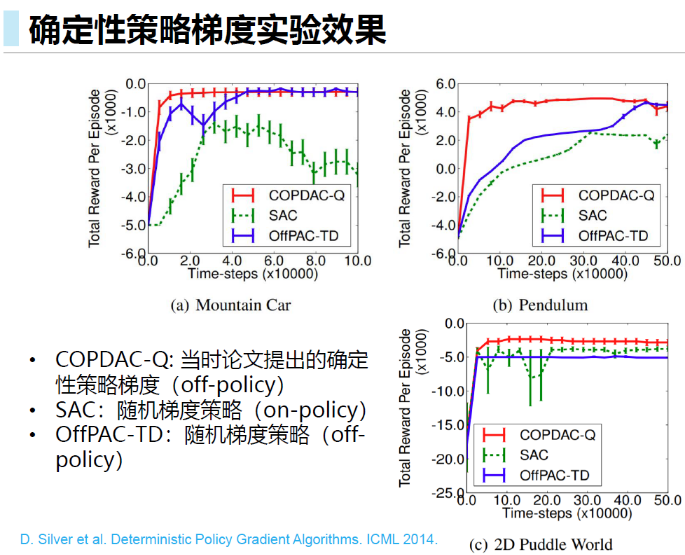
基于确定性策略的方法:确定性策略DDPG
基于价值网络的方法
不直接更新策略,学习价值函数后,更新策略
DQN
最早和最成功地将神经网络引入RL,且引入的技巧被后续更多的DRL采用
通常只能处理动作离散的情况,因为存在 $\max Q$
原理
对于最优的动作满足贝尔曼最优方程
我们希望最优动作价值 $\overline{Q}(s,a)$ 与其价值近似函数 $\hat{Q}(S,A,w)$ 在 $(S_t,A_t)=(s,a)$ 时在期望上误差为0
DQN目标是最小化目标函数(损失函数)——贝尔曼最优误差
使用梯度下降法求解最小化损失函数,但由于涉及两处对 $w$ 求梯度,可以先固定一处 $w$ ,设 $y$ 中的 $w$ 为一个常数
对 $J(w)$ 求解关于 $w$ 的梯度 $\bigtriangledown_w J(w)$ ,只是关于 $\hat{Q}\left(S,A,w\right)$ 中 $w$ 的函数
为此,引入两个网络
- 一个是 main network $\hat{Q}\left(S,A,w\right)$
- 另一个是 target network 为 $y$ 中的 $\hat{Q}\left(S,A,w_T\right)$
main network中的 $w$ 会随着回合的每一步进行更新,target network 中的参数 $w_T$ 会先当做常数,每隔一段时间将 main network 中的参数值复制 $w_T=w$ 再基于更新后的 $w_T$ 作为常数,更新 $w$ ,最后二者都会收敛到最优值 。即目标函数变为
$J(w)$ 的梯度下降变为
DQN的两个技巧
经验回放有助于防止过拟合,限制目标 Q 网络的更新速率已被证明可以增加训练过程的稳定性和效率
带有价值近似函数的 Q-learning 算法是带有梯度的,连续采样到的经验 $
神经网络会批量训练一些黑盒模型,然后更高效地训练神经网络
引入两个网络
main network 与 target network
因为对目标函数中的两个位置求解参数在数学上比较复杂,所以采取异步更新
初始:$w=w_T$
收集数据:使用 $\epsilon-贪心$ 策略进行探索,将得到的状态-动作经验 $
每轮迭代,从经验回放池 $\mathcal{B}=\{(s,a,r’,s’)\}$ 中取出使用 $k$ 条经验进行训练
训练:
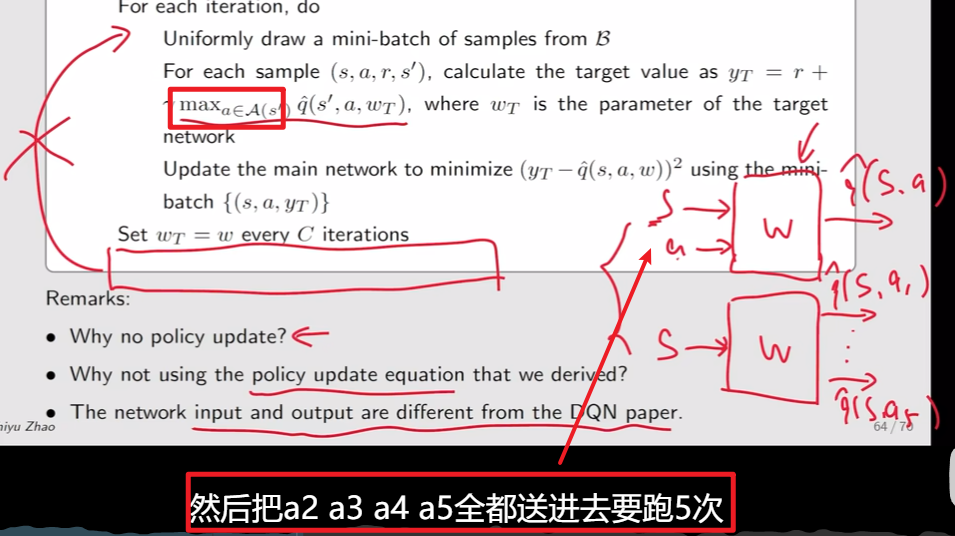
输入:$s,a$ ;target network输出:$y(w_T)=r’+\gamma \max\limits_{a\in \mathcal{A}(s’)}\hat{Q}(s’,a,w_T)$
在少批量经验集上 $\{(s,a,y(w_T))\}$ 上最小化TD误差 / 损失函数 $\left(y(w_T)-\hat{Q}(s,a,w)\right)^2$ ,更新 $w$ 相当于训练 main network
$w$ 的每 $C$ 次迭代(更新Q网络),更新一次目标网络 $w_T=w$ ,重复执行 $1,2$
经验回放
当收集到经验数据后,并不是按照采集顺序使用这些经验,将这些经验存储在成为经验缓存池的集合中 $\mathcal{B}=\{(s,a,r’,s’)\}$ ,每次训练神经网络时,从经验缓存池中取出少批量随机经验
经验回放中的分布
经验回放的必要性与均匀地经验回放
$(s,a)$ 给定之后,$(r’,s’)$ 要服从系统模型的动态特性 $P(r’,s’\vert s,a)$ ,若知道哪些访问会接近目标状态这个先验知识前提下,这些访问对应该被多采样。若没有这个先验知识,则对于所有访问都要一视同仁,保证探索的充分性,即这些经验应该 按均匀分布组成少批量训练经验集
深度Q函数容易过拟合到局部特征,所以若数据是按照时间顺序抽取,则一定会过拟合到时序的最后的经验,为打破经验之间的时序关系,采用经验回放技巧,从经验缓存池中均匀地取出经验
表格型Q-learning中无经验回放
表格型Q-learning中并未涉及到 $(S,A)$ 的分布
因为DQN是一类价值函数近似方法,数学上解决优化问题,需要有一个标量的目标函数去优化,价值函数近似中的标量目标函数是一个期望,会涉及到 $(S,A)$ 的分布。
在基于表格的方法中,如 Q-learning 中求解贝尔曼最优公式,对于每个 $(S,A)$ 都有一组等式去求解,进而得出最优的动作价值
经验回放技术也可应用与表格型方法
对于确定性策略,每个访问对只需要被访问一次就可以,所以并不需要过多的访问
但先前介绍的算法按照时序使用经验,之前所有的经验都不会被使用,在一定程度上是一种浪费
伪代码
异策略的 Q-learning 不需要在每轮迭代后更新策略,因为更新后的策略不会用于生成经验数据
Q-learning解决的是控制问题,在价值更新收敛后,可以直接求解出最优策略
与DQN论文的不同
在于对目标价值的计算,DQN的计算效率更高,输入状态 $s$ 即可得出 $\mathbf{y}(w_T)$ ,在此处,为求解最大的目标动作价值,需要代入 $\vert \mathcal{A}(s)\vert$ 次,再求出最大值
示例
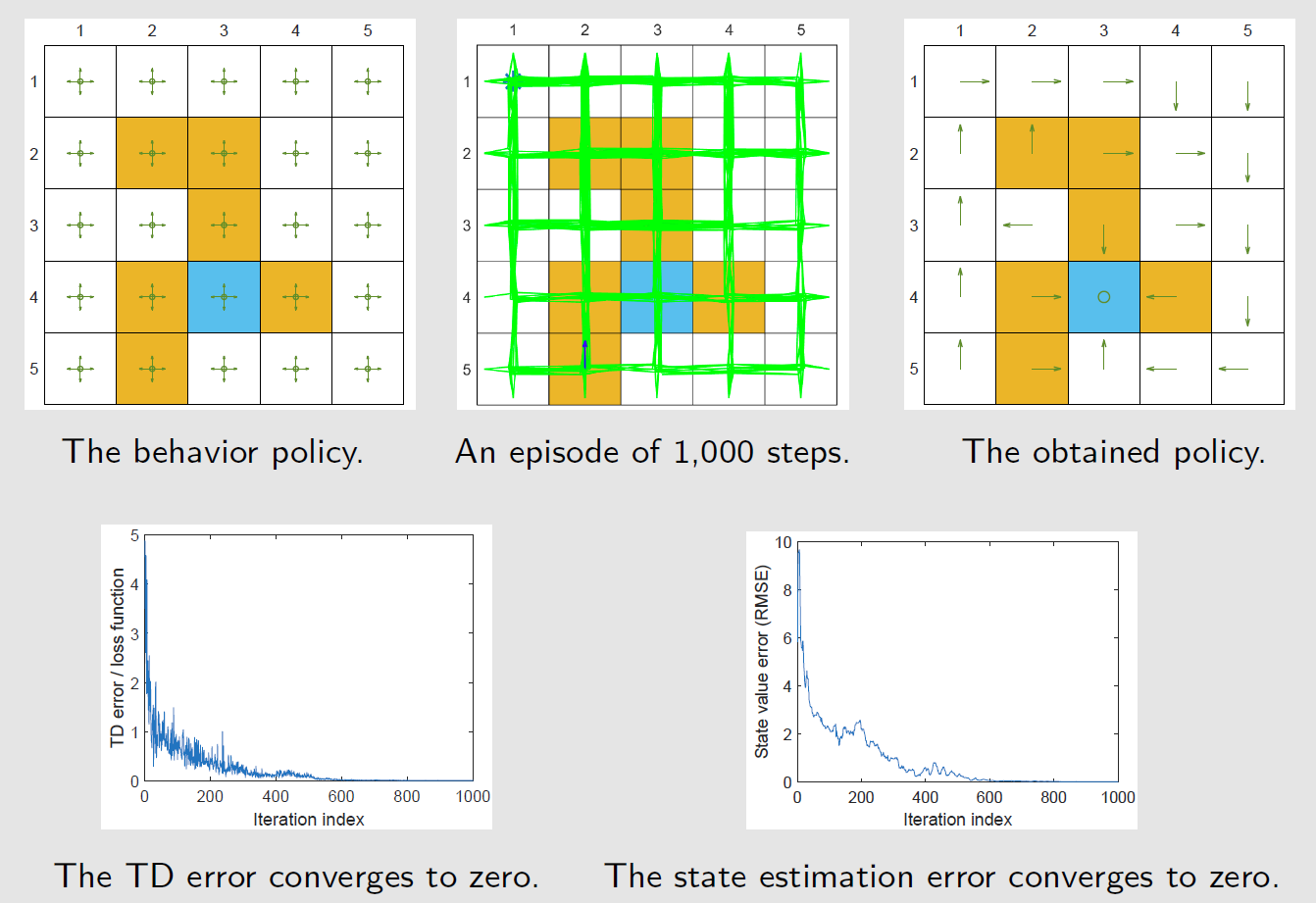
为每个访问对 $(s,a)$ 学习最优的动作价值,只要获取到最优动作价值,贪心策略就能求出最优策略
基于探索策略生成的一个回合训练网络,这个回合有1000步,而表格型 Q-learning需要100000步
非线性价值近似网络 $\hat{Q}(s,a,w)$ 结构:三层网络,输入层-隐藏层(100神经元)-输出层
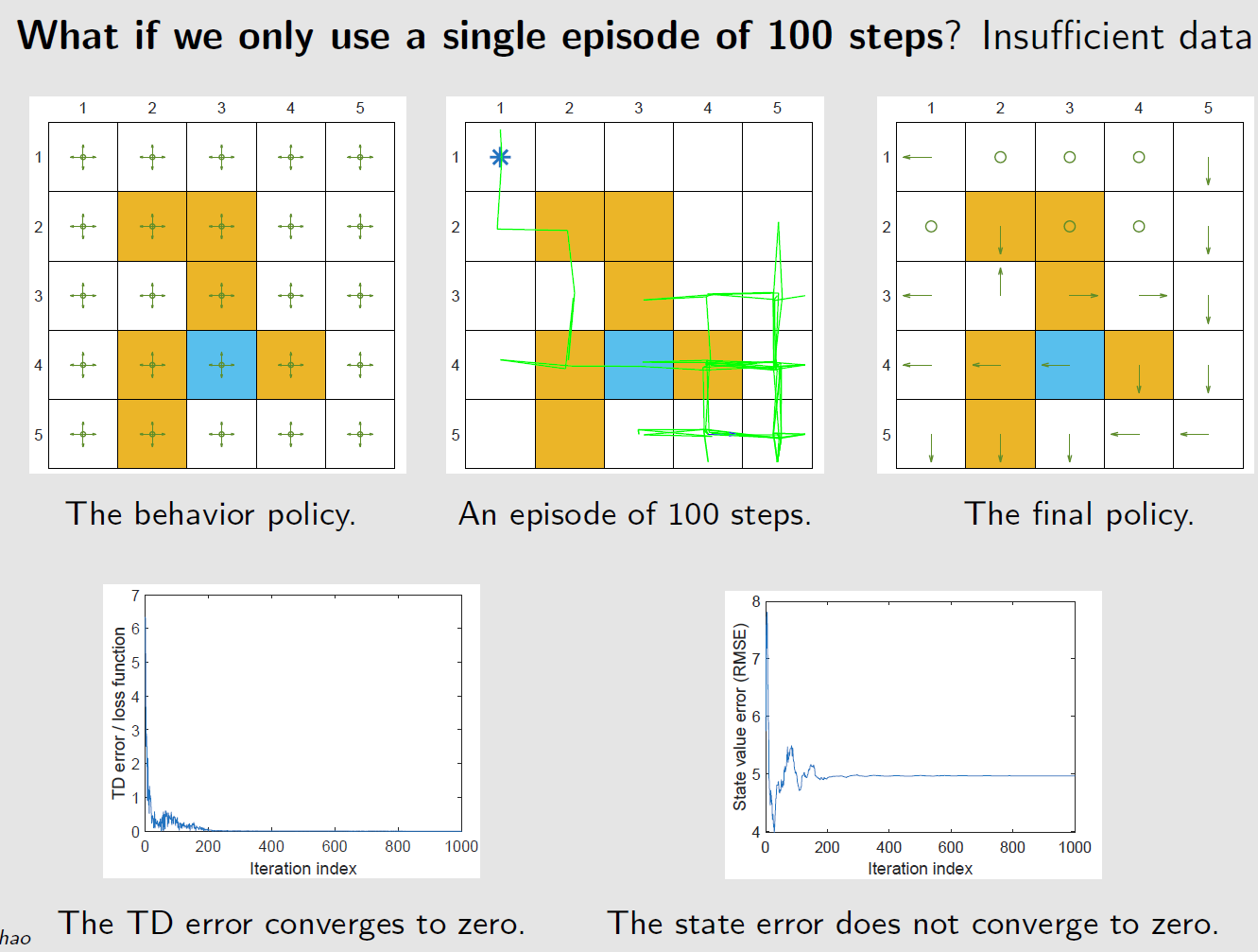
探索不充分,虽然TD误差为0,但状态误差并未收敛到0
基于策略函数的方法
与基于值函数学习的对比
基于价值的学习由一个 $w$ 为参数的价值函数 $Q(s,a,w)$
优化目标为最小化TD误差:
更新方式
基于策略梯度的学习 由一个 $\theta$ 为参数的策略函数 $\pi(a\vert s,\theta)$
优化目标为最大化策略度量指标
更新方式
随机策略与确定性策略
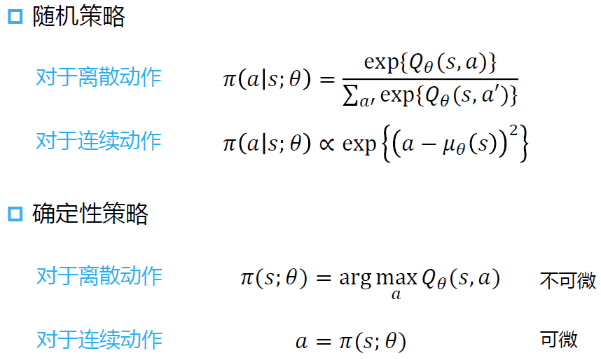
随机策略梯度
softmax策略的梯度
因此,策略网络的梯度为
确定性策略梯度
基于策略梯度,使用梯度上升法最大化策略度量函数
相应的使用随机梯度上升法去近似
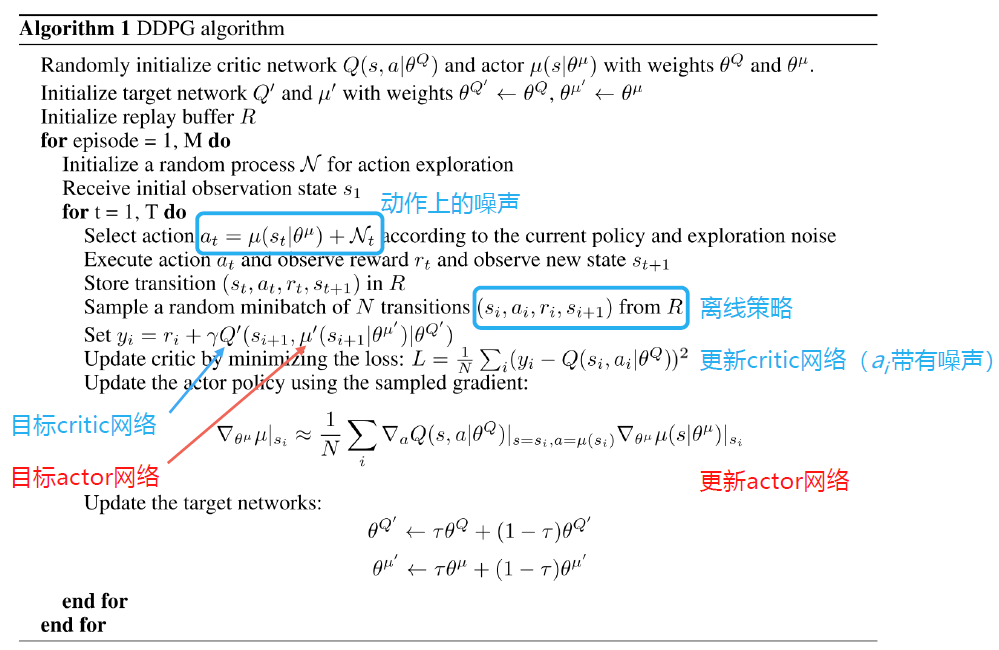
DDPG
在实际应用中,带有神经网络的AC方法是不稳定的,
DDPG给出了DPG基础上的改进方法
经验回放(离线策略):提高样本利用效率
目标网络:DDPG参考DQN,为每个网络引入了目标网络
Actor网络(策略网络)也需要目标网络。因为也会被用于计算Q值
与DQN中不同,DQN每隔一个固定时间更新目标价值网络的参数,DDPG中目标价值网络采用一种软更新方法,逐渐接近价值网络
$\tau=1$ ,则和DQN更新方式一致
采用Double DQN的做法更新目标网络中 $s’$ 的Q值:用训练网络的Q值选择目标网络在 $s’$ 的动作
在动作输入前批标准化Q网络
添加连续噪声 $\mathcal{N}_t$ :由于DDPG是一种确定性策略,本身探索能力有限
作为一种离线策略学习,类比DQN采用 $\epsilon-贪心$ 进行动作探索,DDPG为动作添加连续噪音用于探索